מהם השיקולים החשובים כשמעריכים בטיחות קובוט?
באדיבות ‎DigiKey's North American Editors
2024-04-03
רובוטים שיתופיים (קובוטים) מתוכננים לעבוד עם בני אדם ותומכים בייצור גמיש במפעלי Industry 4.0. בהשוואה לרובוטים תעשייתיים מסורתיים, קובוטים הם פשוטים יותר, קלים יותר להצבה, ואינם דורשים מרחבי עבודה מבודדים בבטחה. בשל היותם מתוכננים לעבוד עם בני אדם, קובוטים בנויים באופן שונה מרובוטים תעשייתיים אחרים, כולל מאפיינים כמו מערכות גילוי התנגשות, משוב כוח, מפעילים (Actuators) אלסטיים ומנועי סרוו בעלי אינרציה נמוכה.
מאחר והם שונים על פי תכנון, פותחו תקני בטיחות ספציפיים עבור קובוטים. ארגון התקינה הבינלאומי של מפרטים טכניים (ISO/TS) 15066 מציין דרישות בטיחות עבור קובוטים תעשייתיים וסביבות העבודה שלהם. הן משלימות את הדרישות וההנחיות לגבי הפעלת קובוטים ב-ISO 10218‑1 ו-ISO 10218‑2.
מאמר זה סוקר בקצרה את הדרישות של ISO/TS 15066 וכיצד הן משתלבות עם ISO 10218-1 ו-10218-2. לאחר מכן הוא בוחן את המורכבויות של שיתוף פעולה, כולל כיצד מרחב העבודה השיתופי מוגדר. הוא בוחן גורמים הקשורים לבטיחות רובוט, כמו מאפייני בטיחות מובנים בקובוטים, ואילו פונקציות בטיחות חיצוניות נדרשות, ביחד עם התקני דוגמה כמו חיישני קירבה, וילונות אור ושטיחוני מגע בטיחותיים. המאמר מסתיים עם סקירה קצרה של מספר יישומים ספציפיים לשיקולי בטיחות של קובוטים.
ישנם מספר תקני בטיחות מרכזיים עבור רובוטים תעשייתיים וקובוטים. ISO/TS 15066 מפרט דרישות בטיחות עבור מערכות קובוט תעשייתיות וסביבת העבודה ונכתב כדי לבנות ולהשלים את הדרישות המוגבלות בתקנים קודמים כמו סדרת ה-ISO 10218. ה-ISO 10218-1 מתמקד על רובוטים כלליים והתקנים רובוטיים, בעוד ה-ISO 10218-2 מתמקד על מערכות רובוט ואינטגרציה. מכון התקנים הלאומי האמריקאי/התאגדות תעשיית הרובוטיקה (ANSI/RIA) R15.06 הוא אימוץ לאומי של ISO 10218-1 ו-ISO 10218-2.
מורכבויות של שיתוף פעולה
לפני שניכנס לפרטים על בטיחות קובוטים, כדאי להגדיר שיתוף פעולה. שיתוף פעולה ברובוטיקה הוא מורכב וכולל שלושה גורמים:
- קובוט הוא "רובוט מתוכנן עבור אינטראקציה ישירה עם בן אדם בתוך מרחב עבודה שיתופי מוגדר", בהתאם ל-ANSI/RIA R15.06.
- פעולה שיתופית היא "מצב בו מערכת רובוט מתוכננת בכוונה ומפעיל עובדים במרחב עבודה שיתופי", בהתאם ל-ISO/TS 15066.
- לבסוף, מרחב עבודה שיתופי הוא "מרחב עבודה בתוך המרחב המוגן שבו הרובוט והאדם יכולים לבצע משימות בו-זמנית במהלך פעולת ייצור", בהתאם ל-ANSI/RIA R15.06.
זה מסתכם בהגדרה של מרחב העבודה השיתופי "בתוך המרחב המוגן". המרחב המוגן כולל שכבת הגנה בטיחותית בנוסף לפונקציות הבטיחות הסטנדרטיות הכלולות בקובוט.
מאפייני הגנה נפוצים משולבים בקובוטים כוללים מערכות לזיהוי מגע מבוססות על מדידות מומנט בכל מפרק, שמנטרות מכות, מכשולים, או כוחות או מומנטים מוגזמים בלתי צפויים. צריכות להיות גם מערכות בלימה אוטומטיות ושחרור בלמים ידני להזזת הזרוע ללא אספקת חשמל.
מגע בלתי צפוי של הקובוט עם האדם מהווה דאגה מיוחדת. התקנים מכתיבים שיש למנוע מגע בכל מקום על ראשו של אדם. נוסף לכך, התקן מחלק את הגוף ל-29 אזורים מיוחדים ומפרט מגבלות לשני סוגי מגע:
- מגע טרנזיינטי הוא ארוע דינמי, נע, בו הקובוט פוגע באדם. המגבלות מבוססות על מיקום, אינרציה ומהירות יחסית.
- מגע מעין-סטטי מתרחש כשחלק גוף לכוד בין הקובוט למשטח. המגבלות מבוססות על לחץ וכוח ביחס להשפעות ריסוק והידוק.
המפרט מספק הנחיות, לא מגבלות אבסולוטיות, מבוססות על שיקולי יישום. הוא גם מציין שההנחיה היא אינפורמטיבית ומשקפת את הפרקטיקות הנוכחיות הטובות ביותר מאחר ושיתוף פעולה בין בני אדם ורובוטים הוא תחום חדש, והמחקר נמשך.
רצף של שיתוף-פעולה
אין יישום שיתופי אחד. בני אדם וקובוטים יכולים לקיים אינטראקציה ברצף של דרכים. יישומים שיתופיים נעים בין דו-קיום, שבו רובוט עוצר תחת אספקת-כוח כשאדם נכנס למרחב העבודה השיתופי, עד לפעילות אינטראקטיבית עם האדם הנוגע בקובוט תוך כדי פעולה (איור 1).
 איור 1: שיתוף פעולה בין בני אדם ורובוט כולל מגוון רחב של רמות אינטראקציה אפשריות. (מקור תמונה: SICK)
איור 1: שיתוף פעולה בין בני אדם ורובוט כולל מגוון רחב של רמות אינטראקציה אפשריות. (מקור תמונה: SICK)
נדרשת הערכת סיכונים כדי לזהות את צרכי הבטיחות של יישומים שיתופיים אינדיבידואליים. היא כוללת זיהוי, הערכת והפחתת המקורות הפוטנציאליים לנזק (hazards) ומידת הסבירות שייגרמו נזקים (risks) הקשורים ביישום. ISO 10218 כולל רשימה של מאפייני בטיחות שיכולים להתאים בנסיבות שונות אך לא דרישות מוחלטות. ISO/TS 15066 מביא פרטים נוספים להערכות סיכוני קובוט. בכל מקרה, מטרת הערכת הסיכונים היא לזהות מערכות והתקני בטיחות חיצוניים הדרושים כדי להבטיח את המימוש הבטוח של יישומים שיתופיים.
להעמקה בהערכת סיכונים ורובוטים, ראה את המאמר "שילוב יעיל ובטוח של רובוטים AMR בתפעול Industry 4.0 עבור תועלת מקסימלית".
הגנה ויעילות
בעוד קובוטים מתוכננים לפעולה בטוחה, שכבות הגנה נוספות יכולות לשפר יעילות של יישומים שיתופיים. ללא בטיחות נוספת, כשאדם נכנס אל מרחב העבודה השיתופי, ISO/TS 15066 מחייב מהירות מקסימלית של 50.2 מטר-לשנייה (s/m) לציר. עבור מרבית הקובוטים, זו מהירות איטית ביותר.
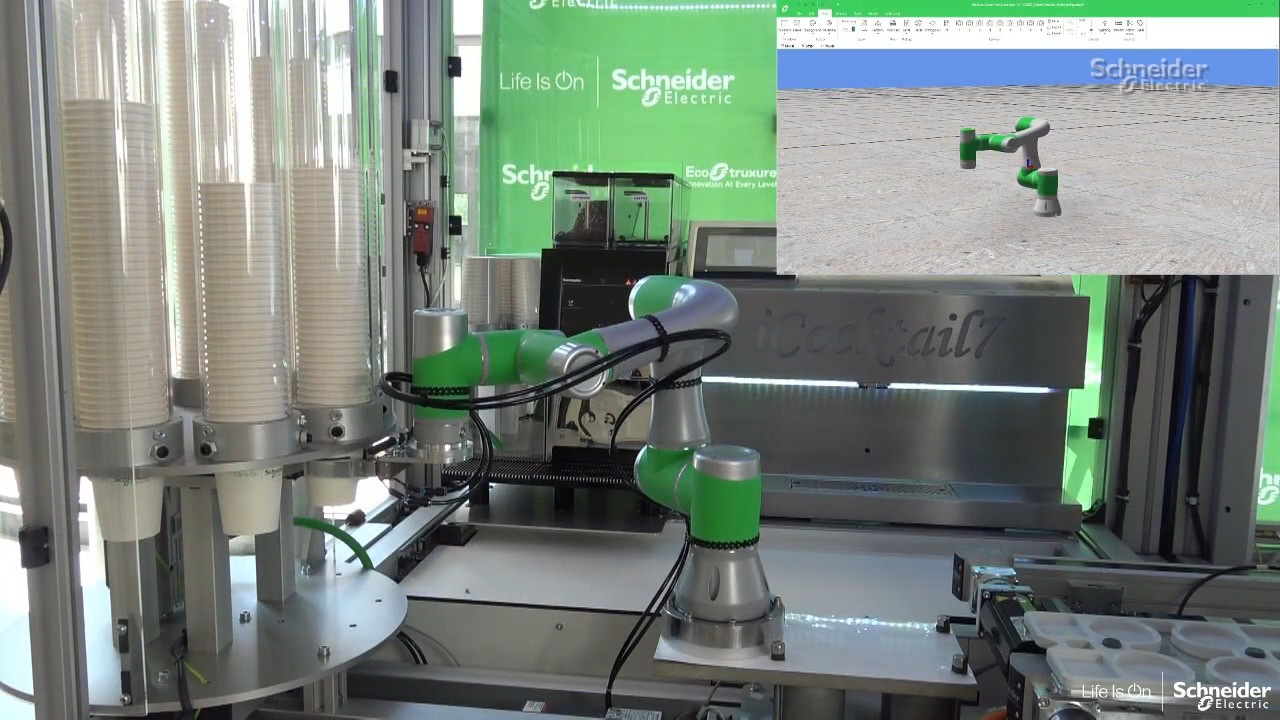
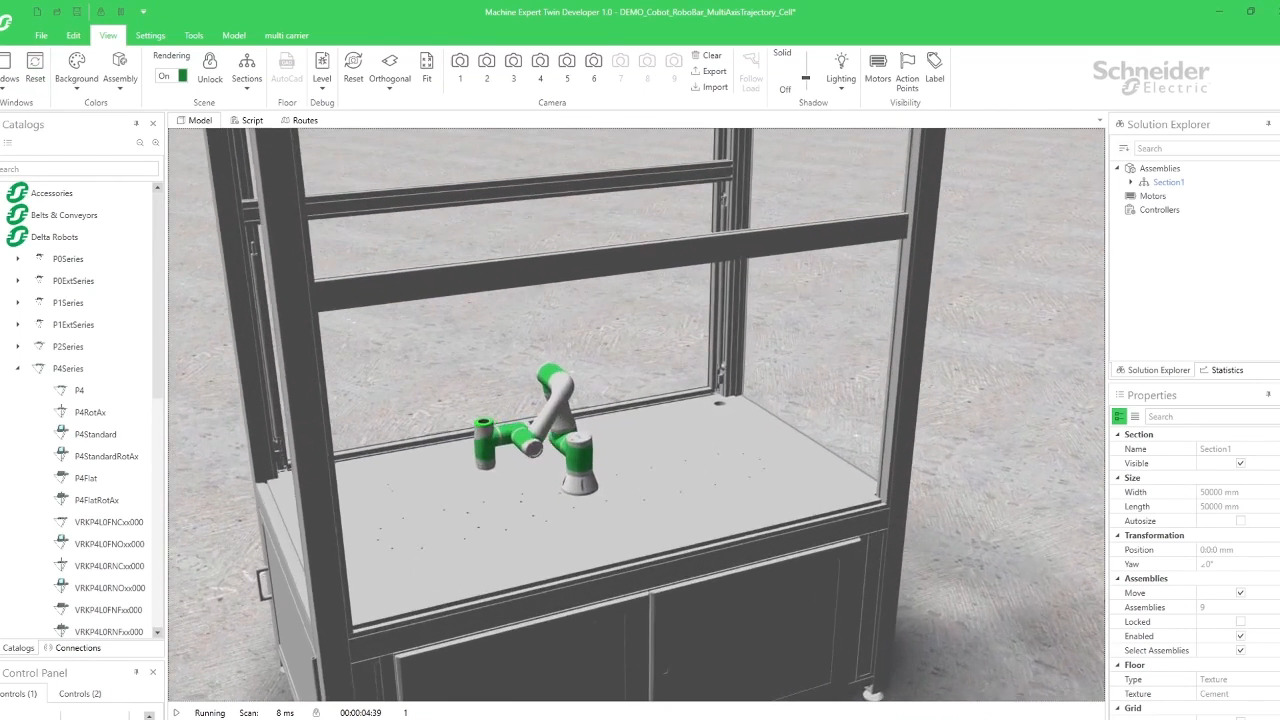
לדוגמה, לקובוט ה-LXMRL12S0000 Lexium מבית Schneider Electric יש מטען ייעודי של 12 קילוגרם (kg), רדיוס פעולה (טווח עבודה) של 1327 מ"מ (mm), דיוק מיקום של ±0.03 מ"מ ומהירות מקסימלית של קצה הכלי של 3 מטר לשנייה (m/s), מהירות גבוהה פי 12 מהמקסימום המותר על ידי ISO/TS 15066 כשבן אדם נמצא במרחב העבודה השיתופי (איור 2).
 איור 2: קובוט זה יכול לנוע 12 פעמים מהר יותר מהמהירות המקסימלית המותרת על ידי ISO/TS 15066 כשאדם נמצא במרחב העבודה השיתופי. (מקור תמונה: Schneider Electric)
איור 2: קובוט זה יכול לנוע 12 פעמים מהר יותר מהמהירות המקסימלית המותרת על ידי ISO/TS 15066 כשאדם נמצא במרחב העבודה השיתופי. (מקור תמונה: Schneider Electric)
ביישומים רבים, הקובוט יכול לפעול לבדו לתקופות ארוכות. כך שחישת הנוכחות או ההעדרות של בני אדם במרחב העבודה השיתופי יכולה לאפשר פעולה מהירה בהרבה ויעילות גבוהה יותר כשאף אחד אינו נוכח. התקנים נפוצים לחישת נוכחותם של אנשים כוללים סורקי בטיחות, וילונות אור ושטיחוני רצפה מגע בטיחותי. כל טכנולוגיה מציעה סט יתרונות שונה, והן משמשות לעתים קרובות בשילוב.
סורקי בטיחות
סורקי בטיחות מנטרים אזור מסוים כדי לגלות את הנוכחות של בני אדם. הם יכולים לקבוע כמה רחוק אדם נמצא וליישם אזורי התרעה שונים בנוסף לאזור הבטיחות האקטיבי.
דגם OS32C-SP1-4M של Omron הוא דוגמה טובה לסורק לייזר בטיחותי המתוכנן לשימוש עם קובוטים. יש לו רדיוס בטיחות של עד 4 מ' (m) ויכול לתמוך באזורי התרעה מרובים עד 15 מ'. הוא כולל 07 סטים סטנדרטיים של שילובי אזורי בטיחות ואזורי התרעה כדי לתמוך במרחבי עבודה שיתופיים מורכבים. נוסף לכך, ניתן להגדיר את רזולוציית האובייקט המינימלית ל-30, 40, 50 או 07 מ"מ, וזמן התגובה יכול לנוע מ-80 מילי-שניות (ms) עד 680 ms, ובכך להגדיל עוד יותר את גמישות היישום (איור 3).
 איור 3: לסורק בטיחות זה רדיוס בטיחות של עד 4 מ' ויכול לתמוך באזורי התרעה מרובים עד 15 מ'. (מקור תמונה: DigiKey)
איור 3: לסורק בטיחות זה רדיוס בטיחות של עד 4 מ' ויכול לתמוך באזורי התרעה מרובים עד 15 מ'. (מקור תמונה: DigiKey)
וילונות אור
וילונות אור יכולים למדוד את הנוכחות של בני אדם ויכולים להיות מתוכננים לגלות אובייקטים בגדלים שונים, כמו אצבעות או ידיים. להבדיל מסורקי בטיחות, וילונות אור אינם מודדים מרחק. הם שולחים סדרה של קרני אור בין מערכי פולטים וקולטים לינאריים ויכולים לחוש כשאובייקט שובר קרן אחת או יותר.
במונחים של דירוגי בטיחות, ישנם שני סוגי וילונות אור עיקריים: סוג 2 וסוג 4. יש להם מראה חיצוני דומה אך מתוכננים לספק רמות שונות של בטיחות. סוג 4 מנטר את המרחב המוגן המגדיר מרחב עבודה שיתופי. וילונות אור סוג 2 מתוכננים עבור יישומים בסיכון נמוך יותר.
וילונות אור מגנים על היקפים וזמינים במספר רמות רזולוציה, כמו 14 מילימטר (mm) עבור גילוי אצבעות ו-24 מ"מ עבור גילוי יד. דגם ה-SLC4P24-160P44 מבית Banner Engineering הוא ערכת וילון סוג 4 עם מערך פולטים וקולטים, בעלת רזולוציה של 24 מ"מ כדי להגן על בני אדם ומכונות כמו קובוטים (איור 4). לפולטים שורה של דיודות פולטות אור אינפרא אדום מסונכרנות. לקולטים שורה מקבילה של פוטו-גלאים מסונכרנים. לפולטים טווח של 2 מ', ווילונות אור אלה ניתנים להתקנה באורכים של 160 עד 320 מ"מ באינקרמנטים של 80 מ"מ.
 איור 4: לווילון אור סוג 4 זה רזולוציה של 24 מ"מ. (מקור תמונה: Banner Engineering)
איור 4: לווילון אור סוג 4 זה רזולוציה של 24 מ"מ. (מקור תמונה: Banner Engineering)
סורקי לייזר בטיחותיים ווילונות אור מספקים אמצעים ללא-מגע לשיפור הבטיחות של מרחבי עבודה שיתופיים. עם זאת, הם יכולים להיות קשים לשימוש בסביבות מאתגרות מבחינה אופטית כמו אזורים עם משטחים מחזירי אור במידה רבה היכולים לשלוח הפרעות אור לא רצויות, והם יכולים להיות מופעלים בגלל דליפת שמן או גריז או אבק או לחות מוגזמים.
חלק מהחיישנים האופטיים האלה כוללים התאמות רגישות שיכולות לסייע בהפחתת סוגים מסוימים של הפרעות. התאמות רגישות אלו יכולות גם להגדיל זמני תגובה ולגרום לפשרות נוספות בביצועים. פתרון אחר הוא להשתמש בשטיחון מגע בטיחותי יחד עם התקני חישה אופטיים.
שטיחוני מגע בטיחותיים
שטיחוני מגע בטיחותיים הם בעלי שני לוחות מוליכים המופרדים על ידי שכבת בידוד בצורת רסטר (raster) וניתנים לשימוש לבד או בשילוב עם סוגים אחרים של חיישנים. אם אדם דורך על השטיחון, הלוח המוליך העליון נלחץ ובא במגע עם הלוח התחתון, דבר שמפעיל אות התרעה (איור 5). החלק החיצוני של השטיחון הוא חומר פוליאוריתן עמיד בפני החלקה ואטום למים, לכלוך ושמן. שטיחון ה-SENTIR דגם 1602-5533 מבית ASO Safety Solutions יכול לחבר עד 10 שטיחונים בטור ליחידת ניטור יחידה עבור כיסוי מקסימלי של 10 מ"ר.
 איור 5: כשדורכים עליה, השכבה המוליכה העליונה והתחתונה של השטיחון הבטיחותי באות במגע, ומפעילות אות התרעה. (מקור תמונה: ASO Safety Solutions)
איור 5: כשדורכים עליה, השכבה המוליכה העליונה והתחתונה של השטיחון הבטיחותי באות במגע, ומפעילות אות התרעה. (מקור תמונה: ASO Safety Solutions)
בטיחות היא בפרטים
אין נוסחה אחת המבטיחה בטיחות. כל יישום שיתופי שונה ויש לטפל בו בהתאם למאפיינים והצרכים הייחודיים שלו. גורם מפתח הוא: היכן נמצא היישום על רצף שיתוף הפעולה (ראה איור 1)? ככל שהאינטראקציה בין הקובוט לבני אדם קרובה יותר, כך יש צורך בשמירה רבה יותר.
יש פרטים נוספים שיש לקחת בחשבון. חלקם כוללים:
- כל מיקום צריך לעבור הערכת סיכונים מפורטת כדי לראות אם הקובוט הועבר מתחנת עבודה לתחנת עבודה. גם אם הם נראים זהים, שינויים קטנים יכולים לעשות את ההבדל בבטיחות.
- אם מכונות אחרות נמצאות במרחב העבודה השיתופי, האם הן צריכות להיות מקושרות למערכת הכיבוי או ההאטה הבטיחותית של הקובוט?
- מאמר זה מתמקד בחומרה קשורה לבטיחות, אך עבור מערכות מרושתות שהן נפוצות יותר ויותר, אבטחת סייבר היא שיקול חשוב למניעת הפרעה לפעילות הקובוטים או מערכות הבטיחות.
סיכום
בטיחות קובוטים היא מורכבת. היא מתחילה עם הגדרת מרחב העבודה השיתופי במרחב המוגן ודורשת הערכת סיכונים של העבודה השיתופית. תקנים כמו ה-ISO/TS 15066 וסדרת ה-ISO 10218 הם חשובים ומספקים המלצות והנחיות. קובוטים כוללים מאפייני בטיחות בסיסיים כמו מערכות גילוי התנגשות, משוב כוח, מפעילים (Actuators) אלסטיים ומנועי סרוו בעלי אינרציה נמוכה. בהתאם לפרטים של היישום השיתופי, ייתכן שיהיה צורך בהתקני בטיחות נוספים כמו חיישני קירבה, וילונות אור ושטיחוני מגע בטיחותיים.
מיאון אחריות: דעות, אמונות ונקודות מבט המובעות על ידי מחברים שונים ו/או משתתפי פורום באתר אינטרנט זה לא בהכרח משקפות את הדעות, האמונות ונקודות המבט של חברת DigiKey או את המדיניות הרשמית של חברת DigiKey.