

ררובוט נייד אוטונומי
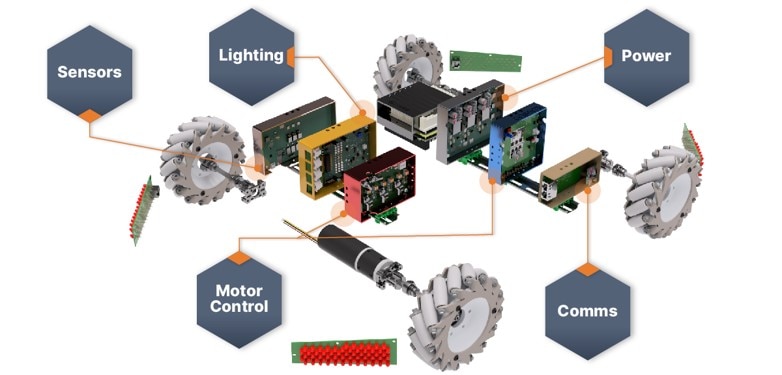
הקונספט של רובוט נייד אוטונומי של onsemi הוא פתרון רובוטי מקיף שתוכנן עם פתרונות יעילים וחדשניים ביותר של onsemi. ניתן להשתמש בקונספט לתכנון סוגים שונים של רובוטים, קובוטים, כלים בהספק גבוה ורכבים מונחים אוטונומיים, על ידי שילוב של פתרונות חכמים שונים של onsemi.
- ערכות בקרת מנועי BLDC
- טעינת סוללות והמרת הספק
- חיישני תמונה ופתרונות LiDAR
- פתרונות חיבוריות
- תאורת LED
- קובוטים ורובוטים תעשייתיים
- רובוטי מחסן
- רובוטי מסירה
- כלי עבודה חשמליים
- רובוטים חקלאיים
- מכסחות דשא
- רכבים מונחים אוטונומיים

סרטון רובוטים ניידים אוטונומיים -

ראיון Embedded World 2024 -

בואו נדבר טכנית: רובוטיקה ובינה מלאכותית (AI) פיזית -
- פתרונות בקרת מנועי BLDC
- פתרונות חישה
- פתרונות הספקת-כוח
- פתרונות תאורה
- פתרונות תקשורת
פתרונות בקרת מנועי BLDC
ראשית, יש לנו את פתרון בקרת מנועי BLDC ושם נוכל למעשה לבחור שלוש פלטפורמות שונות. הראשונה הוא פיתוח המנועים המשולב שלנו המבוסס אקוספין. זהו פתרון משולב במלואו עבור בקרת מנועי BLDC. יש לו דיודות אתחול משולבות. כמו גם מגבר חישה, דוחף שער ומיקרו-בקר. הקושחה זמינה.
הפתרון השני הוא מערכת מבוססת Xilinx המשתמשת בדוחפי שער בדידים וב-MOSFETs. ניתן להשתמש בו עבור פלטפורמות בהן נדרש כוח מחשוב רב יותר ברמת בקרת המנוע.
ולבסוף, יש לנו פתרון מבוסס כלים בהספק גבוה.
מוצרים מוצגים

NCD83591MNTXG
הצגת הפרטים
NVMFS5C410NWFAFT1G
הצגת הפרטים
NCP730BMT250TBG
הצגת הפרטים
NCH-RSL15-512-101Q40-ACG
הצגת הפרטים
פתרונות חישה
הרובוט האוטונומי צריך לראות לאן הוא הולך: לכן הוא זקוק לחיישן תמונה ומודול מצלמה. ההדגמה שלנו משתמשת במודול מצלמה USB של E-con. הוא משתמש בחיישן תמונה מסוג תריס גלובלי שהוא אידיאלי עבור רובוטים אוטונומיים. חיישני תריס גלובלי מאחסנים את נתוני הפיקסלים בכל תמונה בו-זמנית. חיישנים מסוג זה אינם סובלים מארטיפקטי תנועה הנראים בחיישני תריס גלילה, ולכן הם אידיאליים עבור שימוש בעת תנועה ברצפות מפעל או מחסן. לחיישני תריס גלילה יש תחום דינמי גבוה יותר לעומת חיישני תריס גלובלי, ולכן הם יכולים לעבוד טוב יותר במקומות בהם ישנם הבדלים קיצוניים בתנאי התאורה. עם זאת, עבור רובוטים אוטונומיים העובדים במפעלים, תנאי התאורה מתאימים כדי לאפשר שימוש בחיישני תריס גלובלי. חיישן התמונה AR0234CS תומך בתמונות באיכות Full HD בקצב של שישים פריימים בשנייה.
רובוטים אוטונומיים עם זרועות ניידות משתמשים במנועי סרוו כדי לבקר את מיקום הזרועות והתופסנים. זה דורש משוב מיקום מדויק. יתר על כן, אם הרובוט האוטונומי כבה ולאחר מכן מופעל שוב, חשוב לדעת את המיקום המדויק של הזרוע. חיישן מיקום אבסולוטי יכול לקבוע את מיקום הזרוע בכל עת. חיישנים אופטיים יכולים לעשות זאת אך הם זקוקים לרכיבים חיצוניים רבים והם רגישים לשינויים בטמפרטורה. Onsemi היא ספקית מבוססת של חיישני מיקום מותאמים-במיוחד בעלי אמינות גבוהה עבור שוק הרכב. על בסיס ניסיון זה, פיתחנו פתרון חיישן מיקום אינדוקטיבי כפול המשתמש בבקר חיישן NCS32100. נפרט יותר על מוצר זה בהמשך מצגת זו.
מוצרים מוצגים

AR0234CSSM00SUKA0-CR
הצגת הפרטים
AR1335CSSM11SMKA0-CP
הצגת הפרטים
AR0822NPSC10SMTA0-DR
הצגת הפרטים
NCS32100XMNTXG
הצגת הפרטים
NCV75215DB001R2G
הצגת הפרטים
פתרונות הספקת-כוח
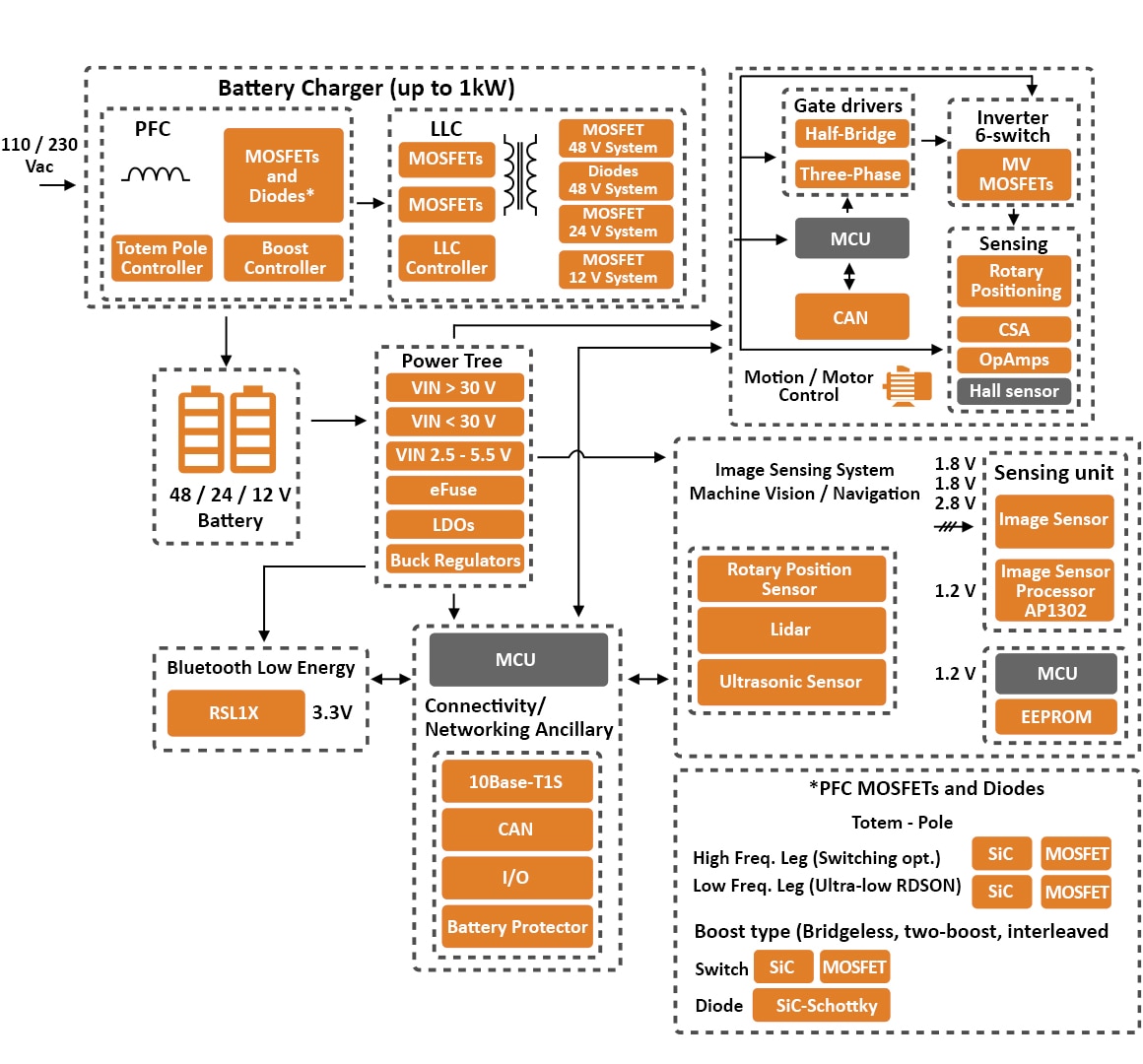
בואו נבחן כעת את ספק-הכוח של הרובוט האוטונומי. אין ספק שהוא מוזן על ידי סוללה, אבל צריך לטעון את הסוללה בשלב מסוים. לרובוט האוטונומי יש את האינטליגנציה לנסוע לנקודת הטעינה. זרוע רובוטית חיצונית מחברת את כבל החשמל לרובוט האוטונומי כדי לטעון את הרובוט.
מטען הסוללות עם כניסת מתח רשת AC W 600 עבור הרובוט האוטונומי מורכב משלושה חלקים: דרגת PFC, ממיר LLC מבודד וממיר Buck. דרגת ה-PFC היא דרגת PFC כפולה משולבת המשתמשת בבקר PFC NCP1632. היא מבטיחה שההספק מקו ה-AC יהיה בעל מקדם הספק טוב ועיוותים הרמוניים כוללים נמוכים. דרגת ה-LLC ממירה את יציאת דרגת ה-PFC, שהיא בערך VDC 400, למתח יציאה של 48V DC באמצעות טופולוגיית LLC עם טופולוגיית חצי-גשר עם סעף-מרכזי. ה-NCP1399 משמש בתכן הנוכחי, כאשר ה-NCP13994 המתקדם יותר מומלץ עבור תכנים חדשים יותר. היציאה מיושרת באופן סינכרוני באמצעות שני טרנזיסטורי MOSFET במתח בינוני FDMS86202ET המבוקרים על ידי שני בקרי יישור סינכרוני NCP4305D.
פרופילי טעינת סוללות כוללים אופני טעינה בזרם קבוע היוצרים מגוון רחב של מתחי פעולה. לדרגות ה-LLC יש תחום פעולה צר עבור יחס המרת המתח שלהם, או ההגבר, ולכן הם אינם פועלים היטב באופן זרם קבוע. במטען הרובוט האוטונומי יש דרגת Buck שלישית המשתמשת ב-FAN65008 היכול לפעול עם מגוון רחב ביותר של יחסי המרת מתח, כך שהוא יכול לספק בקלות את פרופילי הזרם והמתח הנדרשים עבור טעינת הסוללה.
מוצרים מוצגים

NCP1681ABD2R2G
הצגת הפרטים DFN-10 (4x4)")
NCP51530BMNTWG
הצגת הפרטים
NCP51561BADWR2G
הצגת הפרטים W 291 (Tc) חור-עובר TO-247-3")
NTHL045N065SC1
הצגת הפרטים
NCP13994AADR2G
הצגת הפרטים
NCP51561BADWR2G
הצגת הפרטים
NTHL045N065SC1
הצגת הפרטים
NCP4318ALSDR2G
הצגת הפרטים
NCP1076STAT3G
הצגת הפרטים
FAN65008B
הצגת הפרטים
FODM1008
הצגת הפרטים, W 3.3 (Ta), W 187 (Tc) הרכבה משטחית PQFN-8 (5x6)")
FDMS86202ET120
הצגת הפרטים
RSL15
הצגת הפרטים
פתרונות תאורה
פתרון הרובוט האוטונומי שלנו מצויד בנורות LED כדי להציג את נוכחותו לאנשים ולרובוטים אחרים. נורות LED נוספות משמשות עבור איתות. Onsemi היא ספקית מבוססת של פתרונות אורות קדמיים, אורות אחוריים, אורות נסיעה ביום ואורות איתות עבור שוק הרכב והרכבים התעשייתיים. בחרנו שני מוצרים מתוך הפורטפוליו הרחב הזה לשימוש ברובוט האוטונומי שלנו.
פתרון אור LED אחורי לרכב NCV7685 הוא פתרון של דוחף + MOSFET משולב שהוא פשוט לשימוש. ישנם 12 ערוצי mA 60 מקבילים המבוקרים על ידי PWM דרך ממשק I2C. אם המתכנן רוצה להפעיל את דוחף ה-LED ללא מיקרו-בקר חיצוני, הוא יכול לתכנת מראש רגיסטרים OTP ספציפיים כדי להגדיר את יחס המחזור. לדוחף ה-LED יש דיאגנוסטיקת תקלות שניתן לקרוא חזרה על ידי המיקרו-בקר כדי לגלות שגיאות ספציפיות כגון תנאי קצר חשמלי בפין המגדיר את הזרם, שגיאה בתקשורת I2C, אזהרה תרמית, כיבוי תרמי ותנאי עומס פתוח. מידע זה יכול לשמש את המיקרו-בקר כדי לתמוך בפעולות מתקנות נחוצות, כגון תקשור השגיאה לבקר מארח מרכזי אשר מנטר את הרובוטים האוטונומיים המקומיים.
מוצרים מוצגים

NCV7685DQR2G
הצגת הפרטים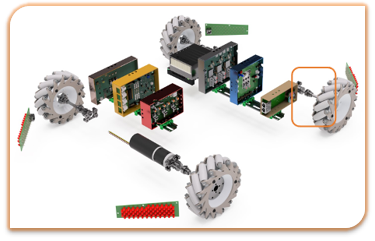
פתרונות תקשורת
באופן מסורתי, ספקי רובוטיקה בחרו בפרוטוקול CAN לרכב עבור תקשורת קווית בין צמתים שונים בתוך הרובוט, כולל BLDC, תאורה, מעבד ומספר חיישנים. טכנולוגיית CAN קיימת כבר עשרות שנים באמצעות חיווט זוג מפותל לא-מסוכך (UTP) קל-משקל וזול בטופולוגיית מספר-נקודות או Daisy Chain, המאפשרת תקשורת Mbps 2 עד Mbps 5 בין צמתים. בינתיים, ככל שרובוטים מקבלים יותר אוטונומיה, או עובדים בהרמוניה קרובה יותר עם בני אדם, יש צורך לשפר את האינטליגנציה הרובוטית. האינטליגנציה הרובוטית משופרת על ידי הוספת עיבוד וחיישנים נוספים לרובוט, כולל LiDAR, חיישני תמונה, חיישני אולטרסאונד, ראדאר ומיקום אינדוקטיבי. חיישני תמונה ו-LiDAR דוחפים יותר קישורי תקשורת נקודה-לנקודה (p2p) לצומת המעבד, ודורשים קצבי נתונים מהירים יותר כמו Gigabit Ethernet. חיסרון אחד עם CAN הוא שצריך שער בין ה-Ethernet ל-CAN, מכיוון שהפרוטוקולים שונים.
בשנת 2019 אישררה ברית ה-Ethernet את תקן IEEE802.3cg עבור 10BASE-T1S, כתחליף ל-"CAN All-Ethernet". כעת, עם 10BASE-T1S, ניתן לתקשר פי 2 עד פי 3 מהר יותר מ-CAN על אותם שני חוטים (SPE: Single Pair Ethernet) ולחסוך בעלות ומשקל נוספים של השער באמצעות בקרי NCN26010 או NCN26000 של onsemi.
מוצרים מוצגים

NCN26010
הצגת הפרטים
NCN26000
הצגת הפרטים
NCV7340
הצגת הפרטים
NCV7342
הצגת הפרטים
NCV7343
הצגת הפרטים
NCV7344
הצגת הפרטים
NCV7349
הצגת הפרטים
NCV7351
הצגת הפרטים
NCV7356
הצגת הפרטים
NCV7357
הצגת הפרטים
NCV7390
הצגת הפרטים
NCV7446
הצגת הפרטים
NCV7450
הצגת הפרטים

