כיצד SMEs יכולים להשתמש במטאוורס (Metaverse) תעשייתי כדי לבחון ולפרוש פתרונות רובוטיים במהירות
באדיבות ‎DigiKey's North American Editors
2024-11-21
רובוטים ורובוטים שיתופיים (קובוטים) נמצאים בקצה המוביל של טכנולוגיות אוטומציה במפעלים. תאומים דיגיטליים ומציאות מדומה (VR) נמצאים בקצה המוביל בכלי תכנון ופיתוח. ביחד, ניתן למנף אותם ליצירת מטאוורס (Metaverse) תעשייתי המעניק פרודוקטיביות גבוהה יותר מהר יותר, אפילו עבור ארגונים קטנים עד בינוניים (SME).
המתכננים בחברות קטנות ובינוניות (SME) יכולים להפיק תועלת מממשק פשוט ואינטואיטיבי המשלב תאום דיגיטלי, מודל וירטואלי מפורט ביותר של אובייקט פיזי כמו רובוט דלתא, ליניארי או רב-צירים, וסביבת VR תלת-ממדית (3D) כדי לאפשר ביצוע ישיר ובדיקה של רצפי התנועה של הרובוט.
השימוש במאפיינים אלו תומך בכוונון עדין ובאופטימיזציה של מערכת האוטומציה גם ללא כל חומרה פיזית ומאפשר בחינה מהירה של מספר אפשרויות פתרון.
מאמר זה סוקר תחילה את ההבחנה בין תאום דיגיטלי מתמטי מתואר-נתונים לבין תאום דיגיטלי ויזואלי (תאום VR) וכיצד שניהם נחוצים כדי ליצור את המטאוורס התעשייתי. לאחר מכן הוא מציג מערכת בקרת רובוטים ותוכנה קשורה של Igus שניתן להשתמש בה כדי לדמות רובוט בממשק 3D (תאום דיגיטלי ויזואלי) ללא שימוש בחומרה פיזית כלשהי, יחד עם רובוטים דלתא, ליניאריים ורבי-צירים תואמים שניתן להשתמש בהם למימוש פתרון אופטימלי.
תאומים דיגיטליים ו-VR הם טכנולוגיות משלימות המשתמשות בצורות דימות, אינטראקציות וחומרה שונות. תאומים דיגיטליים הם מודלים מבוססי-נתונים של אובייקטים פיזיים, מערכות או תהליכים. הם נועדו לשמש לאורך כל מחזור החיים של הפריט שעבורו נבנה המודל, מהרעיון הראשוני ועד לפירוק ומיחזור.
VR היא טכנולוגיה אימרסיבית מבוססת ויזואליות המשתמשת גם במודלים דיגיטליים. בסביבת VR, אפשר לדמות את היחסים והאינטראקציות בין אובייקטים, כגון רובוט שמבצע משימה. לכן, בעוד ששתי הטכנולוגיות יכולות לשמש לתכנון וסימולציה, טכנולוגיית התאומים הדיגיטליים מתמקדת בשיקולי מחזור חיים כולל, ו-VR מתמקדת באינטראקציות בין אובייקטים פיזיים.
מטאוורס (Metaverse) משלב תאומים דיגיטליים ו-VR לתוך סביבה וירטואלית בנויה-במיוחד, התומכת באינטראקציות בזמן-אמת בין האובייקטים הדיגיטליים והאנשים. הוא משויך לעתים קרובות למשחקים, אך מיושם יותר ויותר בפעילויות עסקיות ותעשייתיות.
ברוכים הבאים ל-iguverse
Igus פיתחה את metaverse iguverse כדי לתמוך באינטראקציות הנדסיות בסביבות תעשייתיות, כגון פיתוח ופריסה של מערכות רובוטיות. ניתן ליישם את ה-iguverse באמצעות תוכנת Igus Robot Control (IRC). היישום החינמי וללא רישיון זה מאפשר למשתמשים לבקר סוגים שונים של רובוטים, כולל רובוטים דלתא, קובוטים (זרועות רובוטים) ורובוטים Gantry.
הוא מספק למשתמשים ממשק 3D ומעל 100 תוכניות לדוגמה. דרישות המערכת למימוש iRC כוללות מחשב אישי (מינימום מעבד Intel i5) עם Windows 10 או 11 (bit-64) עם MB 500 של מקום פנוי על הדיסק וחיבוריות Ethernet או רשת אלחוטית.
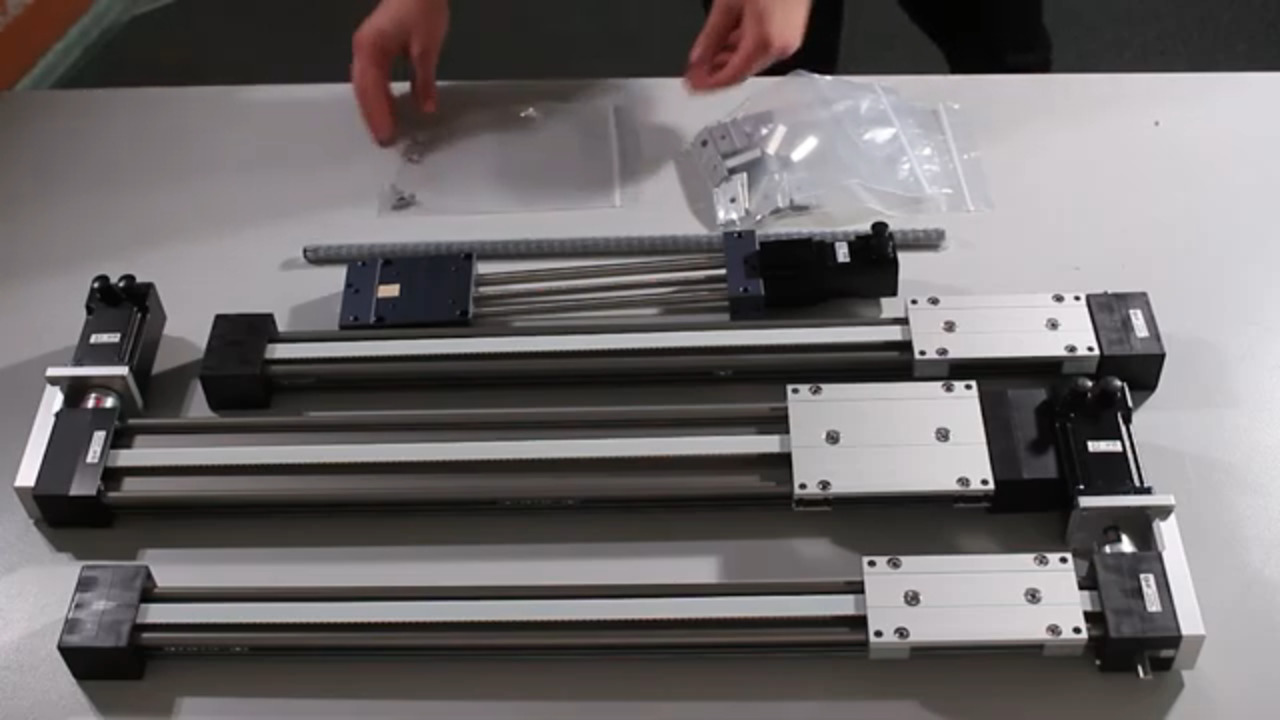
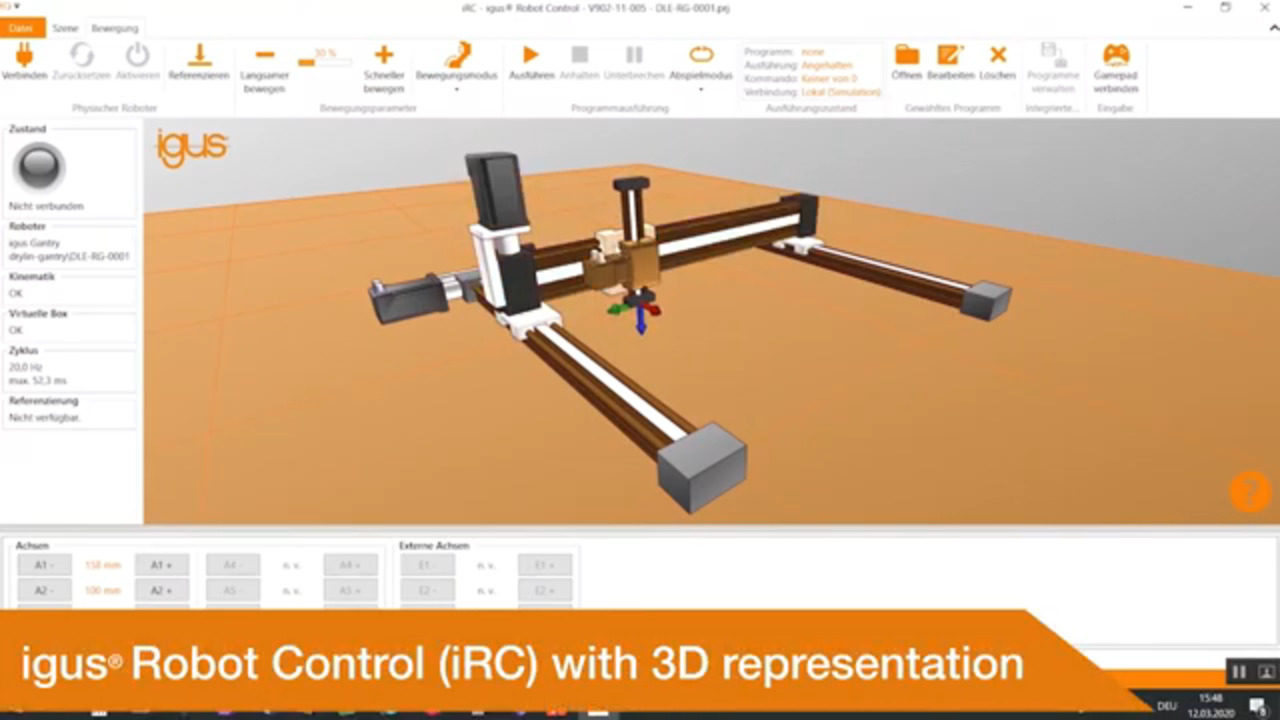
ליבת התוכנה היא תאום דיגיטלי 3D של הרובוט אותו מתכנתים. דוגמה לכך היא רובוט ליניארי תלת-צירי כמו דגם DLE-RG-0001-AC-500-500-100 עם סביבת-עבודה של 500 x 500 x 100 מ"מ, או מפעיל xy דו-צירי כמו דגם DLE-LG- 0012-AC-800-500 עם סביבת עבודה של 800 x 500 מ"מ (איור 1). המתכננים יכולים להגדיר תנועות בכמה לחיצות עכבר ולהשתמש במודל 3D כדי להבטיח שהתנועות הנדרשות ניתנות לביצוע הן בנות-ביצוע, עוד לפני רכישת הרובוט.
 איור 1: דוגמה של תאום VR דיגיטלי 3D של רובוט ג'אנטרי תלת-צירי ב-iguverse. (מקור התמונה: Igus)
איור 1: דוגמה של תאום VR דיגיטלי 3D של רובוט ג'אנטרי תלת-צירי ב-iguverse. (מקור התמונה: Igus)
בנוסף לתוכנת iRC, בקר הרובוט הוא מרכיב מרכזי בסביבת הפיתוח iguverse. לדוגמה, הדגם IRC-LG12-02000 מיועד עבור מנועי V 48, בעל שבע כניסות ושבע יציאות, עם כבל של 10 מטר לחיבור לרובוט. בקרי IRC כוללים מודולי דוחפי מנועים עבור גדלים שונים של מנועי צעד ביפולריים וזמינים כניתנים-להגדרת התצורה או בתצורה מוגדרת-מראש. יש לו גם מספר ממשקים עבור שילוב מערכות, כולל:
- ממשק בקר לוגיקה ניתן-לתכנות (PLC) לתכנות עבור בקרה באמצעות הכניסות והיציאות הדיגיטליות, במיוחד להפעלה ועצירה קלה של תוכניות באמצעות PLC או לחצן
- ממשק Modbus TCP עבור בקרה באמצעות PLC או PC
- ממשק רובוטיקה משותף (CRI) Ethernet עבור בקרה והגדרת-תצורה באמצעות PLC או PC
- ממשק מערכת הפעלה לרובוטים (ROS) עבור הפעלת רובוטים באמצעות ROS
- ממשק עבור מצלמות גילוי אובייקטים
- ממשק ענן עבור ניטור מרחוק של מצב הרובוט
קינמטיקה נתמכת
מגוון של קינמטיקה (תנועות בסיסיות) המגדירות את התנועה המבוקרת של הרובוט נתמכות ב-iguverse. בנוסף לקינמטיקה המוגדרת-מראש, ניתן להגדיר עד שלושה צירים נוספים עצמאיים-קינמטית ב-IRC. קינמטיקה מוגדרת-מראש כוללת:
- רובוטים דלתא 2-צירים ו-3-צירים
- רובוטים ג'אנטרי (Gantry)
- 2 צירים (X ו-Y)
- 2 צירים (Y ו-Z)
- 3 צירים (X, Y ו-Z)
- רובוטים זרועות (קובוטים),
- 3 צירים (1, 2, 3)
- 3 צירים (2, 3, 4)
- 4 צירים (1, 2, 3, 4)
- 4 צירים (2, 3, 4, 5)
- 5 צירים (1 עד 5)
- 6 צירים (1 עד 6)
- רובוט SCARA 4-צירים
תכנות קל עבור אוטומציה בעלות נמוכה
הרובוטים Igus וה-IRC נועדו לתמוך באוטומציה בעלות נמוכה. זה לא יהיה אפשרי ללא ממשק תכנות קל לשימוש. עכבר בעל 3 לחצנים או פד משחקים יכולים להזיז ולמקם את הרובוט ב-iguverse. עם תוכנת IRC, המשתמשים יכולים להזיז בחופשיות את כל הצירים של התאום הדיגיטלי בממשק 3D. פונקציית לימוד (Teach-in) תומכת בפיתוח תוכנת בקרת רובוט, גם ללא חיבור לרובוט פיזי.
כדי לממש Teach-in, המשתמש מזיז באופן ידני את הרובוט הווירטואלי למיקום הנדרש ומגדיר כיצד הוא נע לשם. התהליך חוזר על עצמו עד שנוצר פרופיל התנועה המלא. מרכז הכלים בתוכנת ה-IRC מאפשר למשתמשים להוסיף אפקטורי קצה תואמים, כמו תפסנים, ובקלות ואוטומטית לכוונן את נקודת מרכז הכלי על הרובוט. בנוסף, ניתן להוסיף חיבור למערכת בקרה תעשייתית ברמה גבוהה יותר.
התהליך מתחיל בהפעלת הרובוט באמצעות כפתורי "חיבור", "איפוס" ו"אפשור" לפי הצורך בממשק. נורת סטטוס LED ב-IRC אמורה להפוך לירוקה, והסטטוס אמור לציין "אין שגיאה". כעת ניתן להזין את פרופיל התנועה באמצעות לשונית "Jogging" (איור 2).
 in the iguverse immersive development environment (click to enlarge)") איור 2: ניתן להשתמש בלשונית "Jogging" (שמאל למטה) בסביבת הפיתוח האימרסיבית iguverse כדי להזין פרופילי תנועה. (מקור התמונה: Igus)
איור 2: ניתן להשתמש בלשונית "Jogging" (שמאל למטה) בסביבת הפיתוח האימרסיבית iguverse כדי להזין פרופילי תנועה. (מקור התמונה: Igus)
רובוטי ג'אנטרי (Gantry)
רובוטי ג'אנטרי, כמו אלה שנכללו בדוגמאות הקודמות של iguverse, מורכבים משני צירי X בסיסיים, ציר Y וציר Z אופציונלי. ציר ה-Y מחובר לשני צירי ה-X המקבילים ונע קדימה ואחורה במרחב הדו-ממדי. ציר ה-Z האופציונלי תומך בממד שלישי של תנועה.
לרובוטי ג'אנטרי של Igus יש פסי (Liners) פלסטיק עם גירוז-עצמי המחליקים ומתגלגלים באופן חלק יותר ושקט יותר לעומת תכנים מסורתיים מבוססי מסבים כדוריים. התכן החדש הוא קל משקל יותר, עמיד בפני קורוזיה וללא תחזוקה, שהן תכונות חשובות עבור חברות קטנות ובינוניות (SME). חיוני גם עבור SMEs, רובוטים אלה עולים עד 40% פחות מרובוטי ג'אנטרי מסורתיים, ומספקים החזר מהיר יותר על ההשקעה (ROI).
רובוטים אלה מתאימים עבור שני סוגים של יישומים: מהירויות נמוכות עם עומסים גבוהים או מהירויות גבוהות עם עומסים נמוכים. יישומים מייצגים כוללים אריזה, ליקוט-והנחה (Pick-and-Place), תיוג, טיפול בחומרים ופעולות הרכבה.
הם מוצעים במגוון של גדלים. האביזרים הזמינים כוללים צימודים, אפקטורי קצה ואוגני מנוע. דוגמאות לרובוטי ג'אנטרי בגודל בינוני כוללות:
- DLE-FG-0006-AC-650-650 הוא ג'אנטרי שטוח דו-ממדי עם מרחב עבודה של 650 x 650 מ"מ. רובוט זה יכול להתמודד עם מטענים של עד 8 ק"ג ויש לו קצב דינמי של עד 20 ליקוטים בדקה.
- DLE-RG-0012-AC-800-800-500 הוא ג'אנטרי תלת-ממדי עם מרחב עבודה של 800 x 800 x 500 מ"מ. הוא יכול לטפל במטענים של עד 10 ק"ג עם קצב דינמי של עד 20 ליקוטים בדקה.
מיומנות בניית משטחים
מוצרי בניית משטחים עבור משלוח היא פעילות יומיומית בסביבות ייצור ולוגיסטיקה. החבר החדש והגדול ביותר ב-iguverse הוא רובוט ג'אנטרי הגדול XXL עם מרחב עבודה של 2,000 x 2,000 x 1,500 מ"מ, המתאים היטב עבור יישומי בניית משטחים עד 10 ק"ג. תכנים מותאמים-במיוחד עם מרחבי עבודה של עד 6,000 x 6,000 x 1,500 מ"מ זמינים גם כן.
רובוטי ג'אנטרי אלה יכולים ללקט חלקים במשקל של עד 10 ק"ג, להעביר אותם במהירות של עד 500 מ"מ/שנייה ולהניח אותם על משטח עם עקביות תוצאות של 0.8 מ"מ (איור 3). פתרון רובוט בניית המשטחים של Igus עולה עד 60% פחות לעומת מערכות דומות.
 איור 3: בניית משטחים היא פעילות נפוצה וחשובה בייצור ולוגיסטיקה וניתן לבצע אותה אוטומטית באמצעות רובוט ג'אנטרי. (מקור התמונה: Igus)
איור 3: בניית משטחים היא פעילות נפוצה וחשובה בייצור ולוגיסטיקה וניתן לבצע אותה אוטומטית באמצעות רובוט ג'אנטרי. (מקור התמונה: Igus)
רובוטי דלתא
בדומה לרובוטי ג'אנטרי, רובוטי דלתא זמינים עם שניים או שלושה צירים. לרובוטי דלתא יש מעטפת עבודה בצורת כיפה המותקנת מעל סביבת העבודה. יש להם מהירויות גבוהות ביותר והם משמשים לעתים קרובות לטיפול בחומרים והנחת חלקים. דוגמאות של רובוטי דלתא של Igus כוללות:
- RBTX-IGUS-0047 הוא תכן שלושה-צירים עבור סביבת עבודה בקוטר של 660 מ"מ. יש לו דיוק של ±0.5 מ"מ, עומס מרבי של 5 ק"ג, מהירות מקסימלית של s/m 0.7 , והוא יכול לבצע עד 30 ליקוטים בדקה. (איור 4).
- RBTX-IGUS-0059 הוא תכן 2-צירים עם סביבת עבודה בקוטר של 700 מ"מ. גם לו יש דיוק של ±0.5 מ"מ. המטען המרבי שלו הוא 5 ק"ג, המהירות המרבית שלו היא 2 מטר לשנייה, והוא יכול לבצע עד 50 ליקוטים בדקה.
 איור 4: דוגמה של רובוט דלתא תלת-צירי בסמוך ל-iRC (משמאל) של Igus. (מקור התמונה: DigiKey)
איור 4: דוגמה של רובוט דלתא תלת-צירי בסמוך ל-iRC (משמאל) של Igus. (מקור התמונה: DigiKey)
קובוטי זרועות מפרקיות
iguverse תומך גם בקובוטי זרועות מפרקיות. לקובוטים יכולים להיות בין שניים ל-10 צירים או יותר, הנקראים גם דרגות חופש (DOF). בדרך כלל יש להם מעטפות עבודה גדולות והם יכולים לבצע משימות מורכבות בשיתוף עם אדם. לדגם REBEL-6DOF-02 של Igus יש 6 DOF ולדגם REBEL-4DOF-02 יש 4 DOF. לשניהם יש דיוק של ±1 מ"מ, טווח עבודה נומינלי של 400 מ"מ והם יכולים לבצע מינימום של 7 ליקוטים בדקה במהירות ליניארית של mm/s 200.
לדגם 6 DOF יש עומס מרבי של 2 ק"ג וטווח עבודה מרבי של 664 מ"מ. לדגם 4 DOF יש עומס מרבי של 3 ק"ג וטווח עבודה מרבי של 495 מ"מ (איור 5).
 and 6 DOF (right)") איור 5: קובוטי זרועות מפרקיות של Igus עם 4 DOF (משמאל) ו-6 DOF (מימין). (מקור התמונה: Igus)
איור 5: קובוטי זרועות מפרקיות של Igus עם 4 DOF (משמאל) ו-6 DOF (מימין). (מקור התמונה: Igus)
סיכום
המטאוורס התעשייתי האימרסיבי iguverse משלב תאומים דיגיטליים ו-VR כדי לספק כלים המאפשרים פיתוח ופריסה מהירה של פתרונות רובוטיים. הוא חינמי, ללא רישיון ונועד לפעול באופן מקומי על מחשב אישי ללא חיבור לענן. ניתן להשתמש בו כדי לפתח ולבדוק פתרונות רובוטיים מבלי שהרובוט יהיה נוכח.
הוא תומך במגוון רחב של קינמטיקה ברובוטי דלתא, רובוטי ג'אנטרי (Gantry), זרועות רובוטיות (קובוטים) ורובוטי SCARA. ה-IRC כולל מערך של ממשקים לתמיכה באוטומציה ובצרכים תפעוליים, כולל ממשק PLC, Modbus TCP/IP, CRI Ethernet, ממשק ROS, ממשק מצלמות גילוי אובייקטים וממשק ענן. ה-iguverse, ה-iRC והרובוטים הקשורים של Igus הותאמו כדי לתמוך בצורכי האוטומציה בעלות נמוכה של חברות קטנות ובינוניות (SMEs).
מיאון אחריות: דעות, אמונות ונקודות מבט המובעות על ידי מחברים שונים ו/או משתתפי פורום באתר אינטרנט זה לא בהכרח משקפות את הדעות, האמונות ונקודות המבט של חברת DigiKey או את המדיניות הרשמית של חברת DigiKey.