כיצד להתחיל במהירות לתכנן בקרת מנוע DC ללא-מברשות באמצעות IC משולבים ביותר
באדיבות ‎DigiKey's North American Editors
2021-11-02
בשל המעבר המואץ לכיוון של בקרה אלקטרונית של מערכות מכניות, המונע ברובו על ידי האינטרנט של דברים (IoT) וחשמול כלי רכב, המתכננים מיישמים מנועים בהספק נמוך למשימות בסיסיות ביישומים החל ממכשירי חשמל ביתיים, מנעולי דלתות, תריסים מבוקרים-מרחוק, ועד למשאבות, מושבים, חלונות ודלתות ברכבים. מנועי DC אלה, שדירוג ההספק שלהם נע בין נמוך ותת-פרקציונלי ועד לגבוה, הם נפוצים ביותר אך לעתים קרובות אינם נראים.
בעוד ששיפורים במנועים, כמו גם טכנולוגיית בקרת מנועים טובה וקלה יותר לשימוש, מסייעים לשגשוג המהיר הזה, המתכננים נותרים תחת לחץ מתמיד לשפר את הנצילות ולהוריד את העלות, תוך השגת דיוק גבוה יותר ואמינות גבוהה יותר.
גרסות של מנוע DC ללא-מברשות (BLDC) ושל מנוע צעד (סוג אחר של מנוע DC ללא-מברשות) יכולות לעזור למתכננים לעמוד ביעדי ביצועים ועלות יותר ויותר תובעניים אלה, אך רק עם בחינה זהירה של הבקר ומעגלי הדחיפה של המנוע. הבקר חייב לספק אותות דחיפה מתאימים למתגי הדוחף-האלקטרוני של המנוע (בדרך כלל MOSFET), ולעשות זאת בתזמון ובזמן מבוקרים בקפדנות. הוא גם צריך לבקר את קצבי העלייה/ירידה של המנוע, כמו גם לגלות ולהתמודד עם הבעיות הרכות הבלתי-נמנעות ועם התקלות הקשות במנוע או בעומס.
מאמר זה בוחן את הפונקציות המסופקות על ידי מעגלים-משולבים (IC) לבקרה עבור מנועי BLDC. הוא מעניק פרספקטיבה כוללת על המאפיינים החשמליים של מנועי BLDC ומסביר כיצד בקר מתוחכם מאפשר למנוע BLDC לעמוד ביעדי היישום באמצעות סדרת RAJ306010 מבית Renesas של מעגלים-משולבים (IC) של בקרת מנועים.
נתיב המנוע ובקרת המנוע
הנתיב מתוכנת בקרת התנועה אל המנוע מורכב ממעבד עליו פועלת התוכנה, דוחפי שער להתקני מיתוג הכוח של המנוע והמנוע (איור 1). ייתכן גם שיהיה נתיב מחיישן במנוע בחזרה למעבד דרך קצה-קדמי אנלוגי, המספק מידע על המיקום או המהירות של רוטור המנוע כדי לאשר ביצועים ולסגור את חוג המשוב.
") איור 1: בקרת מנועים של היום מתחילה בתוכנה המשובצת כקושחה במעבד, המבקר דוחפי שער אשר בתורם ממתגים את ההספק לליפופי המנוע; ייתכן גם חוג משוב עם חיישן מהמנוע בחזרה למעבד. (מקור התמונה: Renesas)
איור 1: בקרת מנועים של היום מתחילה בתוכנה המשובצת כקושחה במעבד, המבקר דוחפי שער אשר בתורם ממתגים את ההספק לליפופי המנוע; ייתכן גם חוג משוב עם חיישן מהמנוע בחזרה למעבד. (מקור התמונה: Renesas)
למתכננים יש שתי אפשרויות מובילות עבור המנוע ללא-מברשות המונע על ידי DC: מנוע BLDC ומנוע צעד. שניהם מתפקדים הודות לאינטראקציה המגנטית בין המגנטים הקבועים הפנימיים שלהם לבין המיתוג של הסלילים האלקטרומגנטיים שלהם. הבחירה באיזה משני אלה להשתמש נקבעת על פי היתרונות והחסרונות היחסיים שלהם בהקשר של היישום המיועד.
באופן כללי, מנועי BLDC הם אמינים ביותר, יעילים ויכולים לספק רמות גבוהות של מומנט על פני תחום המהירויות. קוטבי סטטור המנוע מופעלים ברצף מתוזמן וגורמים לרוטור (עם המגנטים הקבועים שלו) להסתובב. למנועי BLDC יש בדרך כלל שלושה סטטורים המבוקרים אלקטרונית סביב ההיקף שלהם (איור 2).
 איור 2: הסטטורים של מנוע BLDC מופעלים ברצף מתוזמן הגורם לרוטור עם המגנטים הקבועים להסתובב. (מקור התמונה: Renesas)
איור 2: הסטטורים של מנוע BLDC מופעלים ברצף מתוזמן הגורם לרוטור עם המגנטים הקבועים להסתובב. (מקור התמונה: Renesas)
תכונות מנוע BLDC העיקריות כוללות היענות, האצה מהירה, אמינות, תוחלת חיים ארוכה, פעולה במהירות גבוהה וצפיפות הספק גבוהה. הם לרוב הבחירה ביישומים כגון ציוד רפואי, מאווררי קירור, כלי עבודה חשמליים ללא-כבל, פטיפונים וציוד אוטומציה.
מנוע צעד פועל בדומה למנועי BLDC, פרט לכך שהוא נע בתנועות סיבוביות קטנות בהרבה הודות לחלוקת סיבוב מלא למספר רב של צעדים שווי-זווית (בדרך כלל, 128 או 256). במקום להסתובב ברציפות, רוטור המנוע נע ברצף מתוזמן כך שהוא צועד בצעדי זווית קטנה אלו (איור 3). זה מאפשר למקם את הרוטור בצורה מדויקת כיוון שהוא מסונכרן עם השדה המגנטי הנוצר על ידי קוטבי הסטטור המשופעלים.
 איור 3: למנוע צעד יש מספר רב של קוטבי סטטור המסודרים סביב הרוטור עם המגנטים הקבועים שלו; על ידי הפעלת הקטבים הללו ברצף מתוזמן, הרוטור מסתובב וצועד דרך זוויות קטנות. (מקור התמונה: Renesas)
איור 3: למנוע צעד יש מספר רב של קוטבי סטטור המסודרים סביב הרוטור עם המגנטים הקבועים שלו; על ידי הפעלת הקטבים הללו ברצף מתוזמן, הרוטור מסתובב וצועד דרך זוויות קטנות. (מקור התמונה: Renesas)
מנועי צעד הם אמינים, מדויקים ומציעים האצה והיענות מהירות. הודות לפעולת הצעד ומבנה המנוע שלהם, בקרת חוג-פתוח ויציבות המיקום מספיקים לעתים קרובות אפילו עבור יישומים מדויקים כמו כונני CD, סורקים שטוחים, מדפסות ופלוטרים. יישומים מתקדמים עשויים להוסיף חיישן משוב ובקרת חוג-סגור להבטחת דיוק וביצועים נוספים.
אפשרויות בקרת מנועי BLDC
שלא כמו מנועי אינדוקציה AC או DC עם-מברשות, שבהם האמצעי העיקרי לבקרת המהירות והמומנט הוא על ידי כיוונון מתח ההספקה, מנוע BLDC מבוקר על ידי תזמון קפדני של ההפעלה והכיבוי של רכיבי ה- MOSFET של מתגי הספקת-הכוח. זה מאפשר למנוע להתמודד בצורה יעילה ומדויקת עם מגוון רחב של משימות.
דרישות אלו יכולות לנוע בין מספר סיבובים-לדקה (סל"ד = RPM) גבוה הדרוש להנעת כמויות גדולות של אוויר כדי לספק יניקה בשואב אבק ללא-כבל, או בכלי עבודה חשמליים החייבים להיות בעלי מומנט התנעה גבוה, במיוחד אם המנוע נתקע כנגד העומס שלו. ביישומים רבים, המנוע חייב להיות מסוגל להתמודד גם עם שינויי עומס גדולים הדורשים זמני תגובה מהירים כדי לשמור על סל"ד עקבי.
ישנן אסטרטגיות נפוצות לבקרת מנועי BLDC: בקרת הפעלה/כיבוי בסיסית של 120⁰ ובקרת וקטור. בבקרת הפעלה/כיבוי של 120⁰, שניים מתול שלושת סלילי מנוע ה- BLDC משופעלים, ושש תבניות שפעול ממותגות ברצף מתוזמן סיבובי כדי לתמוך בסיבוב לכל כיוון (איור 4).
") איור 4: ניתן לשפעל את קוטבי הסטטור של מנוע ה- BLDC (משמאל) בסדר עם כיוון השעון או נגד כיוון השעון (מימין), ובכך להניע את הרוטור לכל כיוון בהתאם לדרישות היישום. (מקור התמונה: Renesas)
איור 4: ניתן לשפעל את קוטבי הסטטור של מנוע ה- BLDC (משמאל) בסדר עם כיוון השעון או נגד כיוון השעון (מימין), ובכך להניע את הרוטור לכל כיוון בהתאם לדרישות היישום. (מקור התמונה: Renesas)
באופן זה, סלילי הסטטור משופעלים עם זרם הפעלה/כיבוי (גל ריבועי), כשהתוצאה היא פרופיל תאוצה טרפזואידלי כאשר מהירות המנוע עולה, אח"כ המנוע שומר על המהירות, ולאחר מכן המהירות יורד כאשר הסלילים אינם משופעלים. היתרונות של גישה זו הם פשטות אינהרנטית ופעולה פשוטה.
עם זאת, הוא פגיע לתנודות בביצועים עם עומס ושינויים אחרים, והדיוק והנצילות אינם גבוהים מספיק עבור יישומים מסוימים. אלגוריתמים מתוחכמים בבקר המנוע יכולים להתגבר על החסרונות הללו במידה מסוימת על ידי התאמת תזמון ההפעלה/כיבוי של ה- MOSFET, כמו גם שימוש בבקרה פרופורציונלית-אינטגרלית-נגזרת (PID) או פרופורציונלית-אינטגרלית (PI).
חלופה שהפכה ליותר ויותר אטרקטיבית היא בקרת וקטור, הנקראת גם בקרה מוכוונת-שדה (FOC). בגישה זו, כל שלושת הסלילים משופעלים באמצעות בקרה רצופה של השדה המגנטי המסתובב, וכתוצאה מכך התנועה חלקה יותר בהשוואה לבקרת 120 מעלות. ה- FOC התקדם לרמה כזו שהוא משמש כיום במוצרים רבים בשוק ההמוני, כגון מכונות כביסה.
ב- FOC, הזרם לכל סליל סטטור נמדד ומבוקר על ידי אלגוריתמים מתקדמים הדורשים עיבוד מספרי מורכב. האלגוריתם חייב גם להמיר ברציפות ערכי AC תלת-פאזי לערכי DC דו-פאזי (תהליך הנקרא המרת פאזות-קואורדינטות), תוך פישוט את המשוואות והחישובים העוקבים הדרושים עבור הבקרה (איור 5). התוצאה של FOC, אם מבוצע כהלכה, היא בקרה מדויקת ויעילה ביותר.
 איור 5: חלק מהאלגוריתם דורש המרת פאזות-קואורדינטות כדי לפשט את חישובי העיבוד המספרי המורכב. (מקור התמונה: Renesas)
איור 5: חלק מהאלגוריתם דורש המרת פאזות-קואורדינטות כדי לפשט את חישובי העיבוד המספרי המורכב. (מקור התמונה: Renesas)
אפשרויות חיישן עבור משוב
את מנועי BLDC ניתן לבקר בטופולוגיית חוג-פתוח ללא אות משוב, או באמצעות אלגוריתם חוג-סגור עם משוב מחיישן הנמצא במנוע. ההחלטה היא פונקציה של שיקולי הדיוק, האמינות והבטיחות של היישום.
הוספת חיישן משוב מוסיפה למורכבות והאלגוריתם ולעלות אך מגבירה את האמון בחישובים, שהוא חיוני ביישומים רבים. בהתאם ליישום, פרמטר התנועה העיקרי הוא מיקום הרוטור או מהירות הרוטור. שני הגורמים הללו קשורים בקשר הדוק: המהירות היא נגזרת הזמן של המיקום, והמיקום הוא אינטגרל-בזמן של המהירות.
למעשה, כמעט כל חיישני המשוב מציינים מיקום והבקר יכול להשתמש באותות שלהם ישירות או לפתח את הנגזרת כדי לקבוע את המהירות. במקרים פשוטים יותר, התפקיד העיקרי של חיישן המשוב הוא כבדיקה הקשורה לבטיחות של ביצועי המנוע הבסיסיים או כמחוון עצירה, ולא עבור בקרת חוג-סגור.
ארבעה סוגים של חיישני משוב הם בשימוש נפוץ: התקני אפקט Hall, אנקודרים אופטיים, רזולוברים וחיישנים אינדוקטיביים (איור 6). כל אחד מהם מציע תכונות ביצועים, רזולוציה ועלות שונים.
 איור 6: למשתמשים יש מגוון רחב של אפשרויות חיישנים אם המערכת שלהם זקוקה לאות משוב מנוע, החל מהתקני אפקט Hall ועד לאנקודרים , רזולוברים וחיישנים אינדוקטיביים. (מקור התמונה: Renesas)
איור 6: למשתמשים יש מגוון רחב של אפשרויות חיישנים אם המערכת שלהם זקוקה לאות משוב מנוע, החל מהתקני אפקט Hall ועד לאנקודרים , רזולוברים וחיישנים אינדוקטיביים. (מקור התמונה: Renesas)
התקני אפקט Hall נחשבים בדרך כלל לפשוטים וקלים ביותר להתקנה, והם מתאימים עבור מצבים רבים. אנקודרים אופטיים זמינים במגוון של רזולוציות, מנמוכה ועד בינונית גבוהה, אך יש להם אתגרי התקנה והם עלולים לעורר בעיות אמינות בטווח הארוך. רזולוברים וחיישנים אינדוקטיביים הם גדולים יותר, כבדים יותר, יקרים יותר ומגיעים עם כמה אתגרי ממשק, אך מספקים רזולוציה גבוהה ביותר וביצועים טובים לטווח ארוך.
הספקת הזרם
הקטבים של מנועים ללא-מברשות - בין אם BLDC או צעד - הם "סלילים" אלקטרומגנטיים ולכן הם חייבים להידחף על ידי זרם ולא על ידי מתח. כדי לשפעל כראוי את הקטבים הללו, מערכת בקרת המנוע חייבת לספק זרם זה באמצעות מתגי הפעלה/כיבוי (רכיבי MOSFET ברוב המקרים) עם תזמון ורוחב פולס מדויקים וקצב שינוי מבוקר כדי להניע את המנוע כראוי וביעילות. סידור ההנעה חייב גם להגן על רכיבי ה-MOSFET מפני מצבי תקלה שונים כגון עצירות מנוע, דרישות זרם חריג, עומסי-יתר תרמיים וקצרים.
עבור מנועים קטנים יחסית, הדורשים בדרך כלל מתחת ל- 500 מיליאמפר (mA) עד אמפר אחד (A), אפשר לשבץ את דוחפי השער של רכיבי ה- MOSFET ואפילו את רכיבי ה- -MOSFET עצמם בתוך מארז המעגל-המשולב (IC) של בקרת המנוע, תוך שמירה על חתימת-שטח קטנה ככל האפשר. אמנם זה נוח ומפשט את התכן, אך זו לא בחירה מעשית במקרים רבים מכמה סיבות:
- תהליכי המוליכים-למחצה עבור MOSFET עם ביצועים עיליים שונים מאוד מאלה המשמשים עבור הלוגיקה הדיגיטלית של הבקר, כך שהתכן הסופי של הצירוף יהיה למעשה פשרה (אך כזו שעשויה להיות מקובלת).
- פיזור ההספק והניהול התרמי של ה- MOSFET מוכתבים בעיקר על ידי צורכי ההספק של היישום. ככל שרמות הזרם וההספק גדלות, פיזור החום הנוצר של ה- MOSFET שעל-השבב יכול לחרוג מגבולות המארז. במקרים אלה, פתרון טוב יותר הוא להפריד בין הפונקציות הדיגיטליות לבין הספקת-הכוח, מה שמאפשר למתכנן למטב את המיקום ואת הניהול התרמי של רכיבי ה- MOSFET.
- לבסוף, ככל שרמות הזרם הנדרשות על ידי המנוע עולות, העלייה במפל המתח המונע-IR במוליכי הספקת-הכוח למנוע עלולה להפוך לבעיה. כמסקנה מכך, רצוי למקם את התקני המיתוג קרוב יותר לעומס.
מסיבות אלו, מעגלים-משולבים (IC) רבים של המנוע ובקרת התנועה כוללים את כל הפונקציות הדרושות, מלבד רכיבי ה- MOSFET להספק. הטופולוגיה של רכיבי MOSFET מרובים נקראת לעתים פונקציית מהפך. השימוש רכיבי MOSFET בדידים מעניק למתכננים את הגמישות לבחור התקנים עם הצירוף הנכון של מפרטים עבור גורמים כגון זרם העומס, התנגדות "מצב-מופעל", סוג המארז ומאפייני המיתוג.
מעגלים-משולבים (IC) מתוחכמים עומדים באתגרי בקרת מנועים
בעבר, בקרת מנוע מתקדמת דרשה מכלל של מעגלים-משולבים (IC). בדרך כלל, זה עשוי להיות כרוך במעבד מהרמה-הנמוכה שיוציא פקודות כלליות, לצד מעבד-משותף ספרתי ייעודי למימוש האלגוריתמים הדרושים, או מעבד מהרמה-העליונה כדי לבצע את שניהם, לצד מעגלי דוחף השער עבור התקני ההספק. לא רק שזה דרש חתימת-שטח גדולה יותר על לוח המעגלים המודפסים ומפרט חומרים (BOM) ארוך יותר, אלא שלעתים קרובות היו בעיות של אינטגרציית המערכות וניפוי הבאגים הקשורים.
עם זאת, המעגלים-המשולבים (IC) של בקרת המנועים של היום יכולים לעשות הכל בהתקן יחיד, כפי שממחיש ה-RAJ306010 מבית Renesas (איור 7). בתוך ה- RAJ306010 נמצאים הבלוקים הפונקציונליים הרבים המיועדים ספציפית לצרכים הייחודיים של תכני בקרת מנועים.
") איור 7: ל- RAJ306010 מבית Renesas יש את הפונקציונליות הנדרשת לבקרת מנועים מתקדמת ביותר (פרט לרכיבי ה- MOSFET להספק), ולכן הוא תופס פחות מקום מפתרון רב-מעגלים-משולבים (IC) תוך פישוט האינטגרציה ומפרט החומרים (BOM). (מקור התמונה: Renesas)
איור 7: ל- RAJ306010 מבית Renesas יש את הפונקציונליות הנדרשת לבקרת מנועים מתקדמת ביותר (פרט לרכיבי ה- MOSFET להספק), ולכן הוא תופס פחות מקום מפתרון רב-מעגלים-משולבים (IC) תוך פישוט האינטגרציה ומפרט החומרים (BOM). (מקור התמונה: Renesas)
מעגל-משולב (IC) של בקרת מנועים למטרות כלליות זה מיועד עבור יישומי מנועי DC תלת-פאזיים ללא-מברשות. הוא מצרף ומשלב באופן הדוק שני תפקידים שונים במארז QFN זעיר בגודל 8 × 8 מילימטר (מ"מ) עם 64 מוליכים: פונקציית הבקר הדיגיטלי, ופונקציית הקדם-דוחף האנלוגית בעיקרה. הוא פועל מהספקת-כוח של 6 עד 24 וולט ומיועד עבור יישומים עצמאיים, בעיקר אוטונומיים, כגון כלי עבודה חשמליים, כלי גינון, שואבי אבק, מדפסות, מאווררים, משאבות ורובוטים. (שימו לב שה- RAJ306001 הכמעט זהה אחרת הוא גרסת 6 עד 30 וולט החולק את אותו גיליון נתונים כמו ה-RAJ306010.)
בצד הדיגיטלי, ה- RAJ306010 משלב מיקרו-בקר Bit-16 (קטגוריית RL78/G1F מבית Renesas) הנתמך על ידי 64 קילובייט (Kbytes) של זיכרון ROM Flash, 4 קילובייט של זיכרון ROM Flash נתונים ו- 5.5 Kbytes של זיכרון RAM. בנוסף, יש כמות ניכרת של I/O דיגיטלי: I/O למטרות כלליות (GPIO), SPI, C2I ו- UART. יש גם ממיר אנלוגי-לדיגיטלי (ADC) Bit-10 עם תשעה ערוצים כדי להביא אותות אנלוגיים לתוך ההתקן.
כדי להשתמש ב- RAJ306010, מתכנן המערכת טוען את פרמטרי הפעולה הרצויים לתוך רגיסטרי הבקרה בזיכרון Flash המתאים כדי לקבוע את אופני הפעולה והתנאים הרצויים. לאחר מכן, המעגל-המשולב (IC) מוכן לתפקד בעת ההתנעה ללא צורך במיקרו-בקר נוסף, כפי שניתן לראות בדיאגרמת הבלוקים ברמה-גבוהה של המערכת של יישום טיפוסי (איור 8).
 איור 8: דיאגרמת בלוקים ברמה-גבוהה של יישום טיפוסי המשתמש ב- RAJ306001 מבית Renesas מראה כיצד רמת האינטגרציה הגבוהה מקטינה למינימום את הצורך ברכיבים בדידים נוספים. (מקור התמונה: Renesas)
איור 8: דיאגרמת בלוקים ברמה-גבוהה של יישום טיפוסי המשתמש ב- RAJ306001 מבית Renesas מראה כיצד רמת האינטגרציה הגבוהה מקטינה למינימום את הצורך ברכיבים בדידים נוספים. (מקור התמונה: Renesas)
הצד האנלוגי של ה- RAJ306010 כולל שלושה דוחפי שער חצי-גשר עם זרם שיא מתכוונן של דוחף-השער עד mA 500, פונקציית מחולל זמן-מת עם יישור-עצמי למניעת "Shoot-Through" ונזקים לגשר, מגבר חישת-זרם, ומגבר EMF-לאחור. Charge Pump אינטגרלי מגביר את מתח דוחף השער המסופק עד ל- 13 וולט ממתח הספקה נמוך יותר.
יש תמיכה ישירה בחיישני אפקט Hall, וניתן להשתמש בקצה-קדמי אנלוגי (AFE) גם כדי לתמוך בסוגים אחרים של חיישני משוב. כמו עם כל בקרת מנוע שתוכננה כהלכה, ישנן פונקציות הכוללות הגנה מפני טמפרטורת-יתר, נעילת מתח-יתר/תת-מתח (UVLO), גילוי זרם-יתר והגנה מפני תנאי נעילת-מנוע.
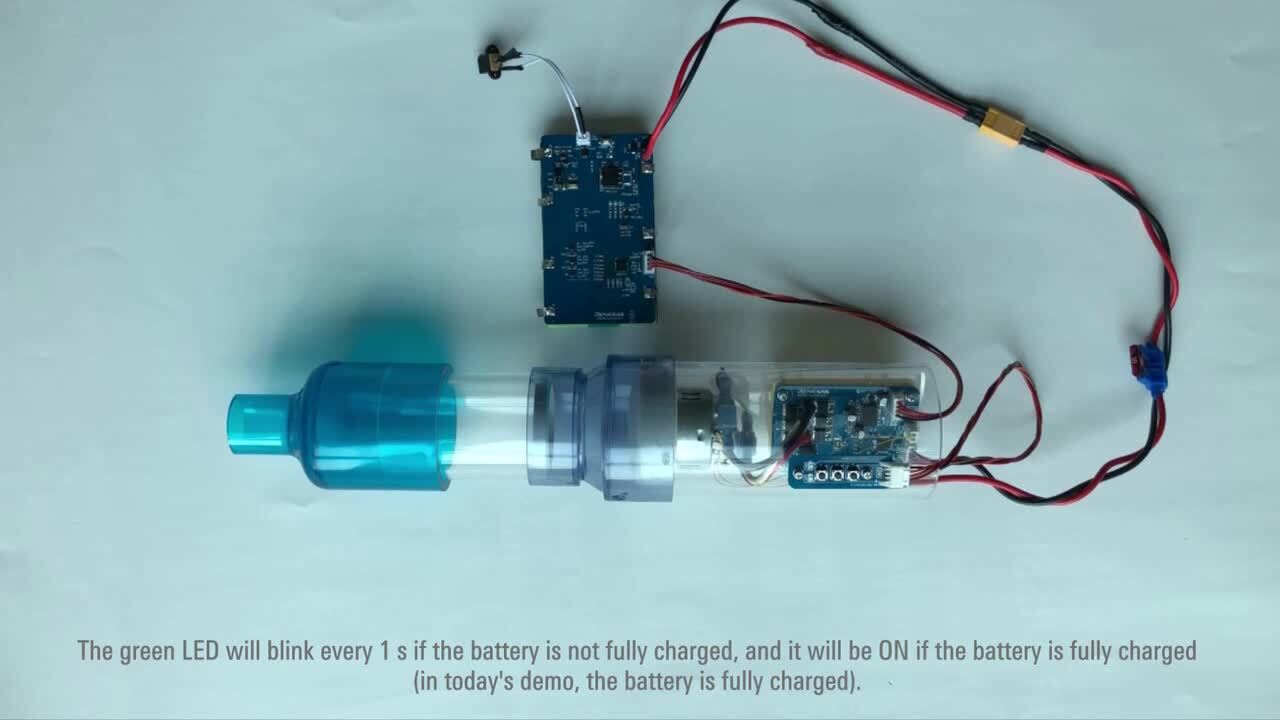
הדוגמה באיור 9 מראה כיצד ה- RAJ306010 מטפל בקלות ביישום עצמאי בסיסי כמו בלנדר ללא-כבל 24 וולט, למרות שזה יכול להיות כמעט כל מכשיר חשמלי קטן דומה. שימו לב שחלק הארי של המעגל מוקדש לטעינה וניהול של מארז הסוללות בן שמונה תאים, בעוד שבקרת המנוע דורשת רק את המעגל-המשולב (IC) של הבקרה, את הגשר התלת-פאזי החיצוני (מהפך), מעגל חישת-מתח משוב (באמצעות נגד חישת-זרם), וכפתור "הפעלה" של המשתמש.
") איור 9: הרמה הגבוהה של האינטגרציה הפונקציונלית של ה- RAJ306010 מראה בבירור כמה מעט מעגלים נוספים וכמה מעט רכיבים נוספים נדרשים עבור פונקציית הליבה של בקרת המנוע של מכשיר חשמל בסיסי, כגון בלנדר מוזן-סוללות זה. (מקור התמונה: Renesas)
איור 9: הרמה הגבוהה של האינטגרציה הפונקציונלית של ה- RAJ306010 מראה בבירור כמה מעט מעגלים נוספים וכמה מעט רכיבים נוספים נדרשים עבור פונקציית הליבה של בקרת המנוע של מכשיר חשמל בסיסי, כגון בלנדר מוזן-סוללות זה. (מקור התמונה: Renesas)
התנסות מעשית עם בקרת מנועי BLDC
זה דבר אחד לתכנן, לבצע סימולציה, להעריך ולכוונן יישום בקרת מנוע "על הנייר" או על מחשב אישי באמצעות מודלים שונים של המערכת הכוללת. אך זה דבר אחר להפעיל מנוע בפועל ולבדוק את הביצועים באמצעות רכיבים אמיתיים, עומסים אמיתיים ודינמיקה אמיתית, כמו גם ללמוד את ההשפעה של הגדרת תנאי ההתנעה הראשוניים והשינויים בפרמטרי הביצועים השונים.
זו הנקודה שבה מערכת הערכת בקרת המנוע RTK0EML2C0S01020BJ מבית Renesas (איור 10) מגיעה לידי ביטוי כנכס חיוני עבור מהנדס התכנון, ביחד עם תוכנת Renesas Motor Workbench המקלה על ניפוי הבאגים. כלי תוכנה זה מאפשר למתכננים להכיר את פעולת ה- RAJ306010, את אופני הכניסה והיציאה שלו ואת הפונקציות של רגיסטרי הבקרה השונים שלו.
 איור 10: לוח זה הוא ליבת מערכת הערכת בקרת המנוע RTK0EML2C0S01020BJ מבית Renesas, כאשר היא משמשת בשילוב עם תוכנת Renesas Motor Workbench, ומאיצה את הכיוונון העדין של הפרמטרים ואת הערכת ביצועי המנוע כאשר משתמשים במעגל-המשולב (IC) של בקרת מנוע RAJ306010. (מקור התמונה: Renesas)
איור 10: לוח זה הוא ליבת מערכת הערכת בקרת המנוע RTK0EML2C0S01020BJ מבית Renesas, כאשר היא משמשת בשילוב עם תוכנת Renesas Motor Workbench, ומאיצה את הכיוונון העדין של הפרמטרים ואת הערכת ביצועי המנוע כאשר משתמשים במעגל-המשולב (IC) של בקרת מנוע RAJ306010. (מקור התמונה: Renesas)
כדי לזרז עוד יותר את שלב פיתוח המוצר, מערכת ההערכה כוללת מנוע BLDC 24 וולט/mA 420 עם מהירות ללא-עומס של 3,900 סל"ד ומומנט נקוב של 19.6 מיליניוטון-מטר (mN-m) (שווה ערך ל-200 גרם כוח-סנטימטר). בנוסף, חברת Renesas מספקת רוטינות בקרת תוכנה לדוגמה עבור הן בקרה ללא-חיישנים והן בקרה מבוססת-חיישנים.
סיכום
למתכננים המשלבים מנועי DC במערכות שלהם יש אפשרויות רבות מעבר למנוע DC עם-מברשות קלאסי, מאחר וקיימים מנועי BLDC עם ביצועים עיליים ועם יחס עלות-תועלת מיטבי המציעים הספק ודיוק במארזים קטנים. כדי לממש את מלוא הפוטנציאל של מנועי BLDC אלה, בקרים חכמים משלבים ומממשים את האלגוריתמים הדרושים עם הפרמטרים הרצויים של המשתמש. הם גם מספקים את הדוחף הדרוש ל- MOSFET המיתוג של המנוע ו-I/O אנלוגי אחר עבור פתרון בקרת מנוע שלם.
כפי שהוצג, מעגלים-משולבים (IC) כדוגמת ה- RAJ306010 מבית Renesas, הנתמכים על ידי ערכות פיתוח ותוכנה, מפשטים מאוד את אתגר התכנון של גודל קטן ובקרת מנוע יעילה עבור יישומים כגון מכשירי חשמל, מושבים וחלונות לרכב, ועוד יישומים רבים אחרים הנפוצים כיום.
מקורות
- אלגוריתמים של בקרת מנועי BLDC
- מערכת הערכת בקרת מנועי BLDC RTK0EML2C0S01020BJ עבור מעגלים-משולבים (IC) של בקרת מנועים RAJ3060xx
- דף יישומים R01AN3786EJ0102, "בקרת וקטור ללא-חיישנים עבור מנוע סינכרוני עם מגנט קבוע (אלגוריתם)"
- פיתרון כלי עבודה חשמליים ניידים
- בלנדר ללא-כבל V 24
- פיתרונות מנועים: סביבת פיתוח בקרת מנועים ידידותית-למשתמש כדי לקצר את זמן היציאה לשוק
מיאון אחריות: דעות, אמונות ונקודות מבט המובעות על ידי מחברים שונים ו/או משתתפי פורום באתר אינטרנט זה לא בהכרח משקפות את הדעות, האמונות ונקודות המבט של חברת DigiKey או את המדיניות הרשמית של חברת DigiKey.