כיצד לממש במהירות מערכת מיקום באמצעות מודולי GNSS רבי-מערכים (Multi-Constellation)
באדיבות ‎DigiKey's North American Editors
2021-09-09
השימוש בפונקציות מבוססות-מיקום באמצעות מקלטי מערכת לווייני ניווט גלובלית (GNSS) רבי-מערכים עבור Galileo של אירופה, מערכת מיקום גלובלית (GPS) של ארה"ב, GLONASS של רוסיה, מערכת לווין ניווט BeiDou של סין ו- QZSS של יפן התרחב על פני מגוון רחב של יישומים הכוללים רובוטיקה, רכבים אוטונומיים, אוטומציה תעשייתית, לוגיסטיקה ומעקב נכסים, רחפנים, חקלאיות וציוד בנייה כבד. היתרונות בשימוש במקלטי GNSS רבי-מערכים כוללים; זמינות טובה יותר של אותות מיקום, ניווט ותזמון (PNT), דיוק ותקינות טובים יותר וחוסן יישומים משופר.
אך פיתוח מקלטי רבי-מערכים היא פעילות מורכבת וגוזלת-זמן הכוללת: אופטימיזציה של אנטנת פס-L; תכנון קצה קדמי תדרי רדיו (RF); שילוב אלגוריתמי עיבוד אותות פס-בסיס לקליטה, מעקב, ויישום תיקונים על אותות ה- PNT השונים; קידוד תוכנת העיבוד של היישום לחילוץ נתוני PNT מכל ערוץ של פס-הבסיס ושימוש במידע למימוש פונקציות המערכת. המתכננים חייבים גם לבחור אנטנה מתאימה ולמקם אותה נכון.
כחלופה, המתכננים יכולים לפנות לסביבות פיתוח ומודולי GNSS מהונדסים-מראש כדי לשלב במהירות וביעילות את יכולת המיקום בתוך המערכת. מודולי GNSS אלה כוללים קצה-קדמי RF, עיבוד פס-בסיס ואת הקושחה המשובצת כדי להאיץ את פיתוח תוכנת עיבוד היישומים. כמה מודולי GNSS כוללים גם את האנטנות.
מאמר זה סוקר את היסודות של GNSS, PNT, ואת הפעולה של מקלטי GNSS רבי-מערכים. לאחר מכן הוא בוחן את היתרונות והחסרונות של שילוב אנטנות במודולי GNSS לפני הצגת מספר מודולי GNSS - עם ובלי אנטנות משולבות - וכן לוחות הערכה נלווים של החברות STMicroelectronics, Septentrio ו- Würth Elektronik שהמתכננים יכולים ליישם לטובת פיתוח יעיל עם יחס עלות-תועלת מיטבי של יישומים מבוססי-מיקום מדויקים וחסונים.
מה הם GNSS ו- PNT?
GNSS ו- PNT הם מושגים הקשורים זה לזה. לווייני GNSS הם המקור הנפוץ ביותר לאותות PNT. לווייני GNSS הם למעשה שעונים מסונכרנים בעלי דיוק גבוה המשדרים ברציפות את נתוני ה- PNT שלהם. מודול GNSS מקבל אותות PNT מלוויין נתון ומחשב את המרחק שלו מאותו לוויין. כאשר המקלט יודע את המרחק לפחות לארבעה לוויינים, הוא יכול לאמוד את המיקום שלו. עם זאת, דיוק אומדן המיקום מושפע ממגוון של מקורות שגיאה, כולל:
- סחיפת השעון של מעגלי שמירת הזמן בלווייני GNSS
- אי-דיוקים בחיזוי המיקום במסלול המעגלי המדויק של לווייני GNSS
- סחיפת ביצועים כללית בציוד הלווין הכולל ביחס ללוויינים אחרים, הידוע גם בשם הטיות הלוויין
- עיוותים ושיהויים בשידור האותות כשהם עוברים ביונוספירה ובטרופוספירה.
- החזרות רבות-מסלולים וביצועים וסחיפה משתנים במקלט
קיימות טכניקות שונות העומדות לרשות המתכננים לתיקון שגיאות GNSS מבוססות-לווין ואטמוספירה.
שיפור ביצועי GNSS
הדרך הטובה ביותר למזער את ההשפעה של טעויות שמקורן במקלט GNSS היא להשתמש במקלט בעל הביצועים הטובים ביותר המתאים לאילוצי העלות והגודל של יישום נתון. אך אפילו מקלטים בעלי ביצועים טובים אינם מושלמים; סביר להניח שניתן לשפר את הביצועים שלהם. חשוב להבין את שיטות התיקון הללו מכיוון שהן מציעות ביצועים שונים, וחלק ממודולי GNSS אינם מסוגלים ליישם את כולן.
תחנות-בסיס קרקעיות משמשות במספר שיטות תיקון GNSS (איור 1). השיטות המבוססות ביותר לשימוש בתחנות ייחוס קרקעיות למתן תיקוני GNSS למקלטים הן Real-Time Kinematic (RTK) ומיקום נקודה מדויק (PPP). לאחרונה, שיטות RTK-PPP היברידיות הפכו לזמינות.
 איור 1: מקלט משתמש GNSS יכול לקבל מידע על שגיאות אטמוספירה, שעון ומסלול מרשת ייחוס לשיפור דיוק המיקום. (מקור התמונה: Septentrio)
איור 1: מקלט משתמש GNSS יכול לקבל מידע על שגיאות אטמוספירה, שעון ומסלול מרשת ייחוס לשיפור דיוק המיקום. (מקור התמונה: Septentrio)
RTK מסתמך על תחנת בסיס אחת או על רשת ייחוס מקומית עבור נתוני תיקון שיכולים למנוע את מרבית שגיאות GNSS. RTK מניח שתחנת הבסיס והמקלט ממוקמים קרוב - לכל היותר 40 קילומטרים (ק"מ) או 25 מייל זו מזה - כך שהם חשופים לאותן השגיאות. Post-Processed Kinematic או PPK היא וריאציה של RTK ונמצאת בשימוש נרחב במדידות ומיפוי להשגת נתוני מיקום בדיוק גבוה או דיוק ברמת-סנטימטר.
רק שגיאות מסלול ושעון הלוויין משמשות לביצוע תיקוני PPP. שגיאות ספציפיות-ללוויין אלה אינן תלויות במיקום המשתמש, מה שמגביל את מספר תחנות הייחוס הדרושות. עם זאת, PPP אינו מתייחס לשגיאות הקשורות לאטמוספירה ולכן יש לו דיוק נמוך יותר ביחס ל- RTK. בנוסף, תיקוני PPP יכולים להיות בעלי זמני אתחול של כ- 20 דקות. זמני האתחול הארוכים יותר והדיוק הנמוך יותר הופכים את ה- PPP ללא-מעשי עבור יישומים רבים.
יישומים הזקוקים לדיוק קרוב לזה של RTK ולזמני אתחול מהירים משתמשים לעתים קרובות בשירות התיקון החדש ביותר, RTK-PPP (המכונה לעתים State-Space Representation (SSR)). הוא משתמש ברשת ייחוס עם תחנות המרוחקות כ- 100 ק"מ (65 מייל) אחת מהשנייה האוספות נתוני GNSS ומחשבות שילוב של תיקוני לווין ואטמוספירה. רשת הייחוס משתמשת ברשתות אינטרנט, לווינים או טלפונים ניידים כדי לשלוח את נתוני התיקון למנויים. מקלטי GNSS המשתמשים ב- RTK-PPP יכולים להיות בעלי דיוק של תת-דצימטר. הבחירה להשתמש בשיטות תיקון RTK, PPP ו- RTK-PPP כרוכה בשורה של פשרות תכנון שהמפתחים צריכים לבחון כדי לבחור את הפתרון האופטימלי עבור פרופיל היישום הספציפי. (איור 2).
 איור 2: נקודות החוזק והחולשה של שלוש שיטות תיקון GNSS נפוצות. (מקור התמונה: Septentrio)
איור 2: נקודות החוזק והחולשה של שלוש שיטות תיקון GNSS נפוצות. (מקור התמונה: Septentrio)
מערכות Satellite-Based Augmentation Systems (SBAS) מתחילות להיות זמינות על בסיס אזורי כדי להחליף את שיטות התיקון המבוססות על תחנות הקרקע RTK, PPP ו- RTK-PPP. מערכת SBAS עדיין משתמשת בתחנות קרקע למדידת שגיאות GNSS, אך התחנות פרושות על פני יבשות שלמות. השגיאות הנמדדות מעובדות במיקום מרכזי שבו מחושבים התיקונים ומועברים ללוויינים גיאו-סינכרוניים על פני השטח המכוסה. נתוני התיקון משודרים מהלוויינים כשכבת-על או כהרחבה לנתוני GNSS המקוריים.
דיוק ה- GNSS תלוי בזמינות ובדיוק של מדידות הלוויין והתיקונים הנלווים. מקלטי GNSS בעלי ביצועים עיליים עוקבים אחר אותות GNSS במספר תדרים ומשתמשים במספר מערכי GNSS ובשיטות תיקון שונות כדי לספק את הדיוק וכושר ההתאוששות הנדרשים. היתירות המתקבלת מאפשרת ביצועים יציבים גם אם חלק ממדידות הלוויין והנתונים חווים הפרעות. המתכננים יכולים לבחור מתוך מגוון של יכולות דיוק ויתירות GNSS (איור 3).
 איור 3: דירוגי דיוק GNSS עם שיטות התיקון המתאימות ויישומים נבחרים. (מקור התמונה: Septentrio)
איור 3: דירוגי דיוק GNSS עם שיטות התיקון המתאימות ויישומים נבחרים. (מקור התמונה: Septentrio)
מודולי GNSS: משולבים לעומת אנטנות חיצוניות
בשל המורכבות של מיקום רב-מערכי, ניתן להשיג מודולים מספקים שונים המסייעים להאיץ את זמן היציאה לשוק, להוזיל עלויות ולהבטיח ביצועים. עם זאת, המתכננים צריכים לשקול אם להשתמש באנטנה פנימית או במקום זאת לבחור באחת הנמצאת חיצונית למודול GNSS. עבור יישומים שבהם זמן היציאה לשוק והעלות הם בראש סדר העדיפויות, אנטנה משולבת עשויה להיות עדיפה מכיוון שמדובר בפחות מאמצי הנדסה באופן משמעותי. עבור יישומים הזקוקים להרשאת FCC או CE, השימוש במודול עם אנטנה משולבת יכול גם להאיץ את תהליך האישור. עם זאת, גודל הפתרון עלול לגדול, והגמישות עשויה להיות מוגבלת עם פתרונות אנטנה משולבים.
אנטנות חיצוניות מספקות למתכננים מגוון רחב יותר של ביצועים ואפשרויות פרישה. ניתן לבחור אנטנה בעלת ביצועים עיליים או אנטנה קטנה יותר עם ביצועים נמוכים יותר. בנוסף, מיקום האנטנה הוא גמיש יותר ביחס למיקום מודול ה- GNSS, ומשפר עוד יותר את גמישות התכן. גמישות המיקום מאפשרת גם לאנטנות חיצוניות לספק פעולת GNSS אמינה יותר. עם זאת, מיקום האנטנה וניתוב החיבורים יכולים להיות תהליך מורכב וגוזל-זמן הדורש מומחיות ספציפית ועלויות גבוהות יותר העלולים להאט את זמן היציאה לשוק.
מודול GNSS זעיר עבור תכנים מוגבלי-מקום
צוותי תכנון בעלי המומחיות הנדרשת במיקום אנטנות וניתוב יכולים להשתמש במודול GNSS רב-מערכים (GPS/Galileo/GLONASS/BeiDou/QZSS) TSEO-LIV3F מבית STMicroelectronics המשתמש באנטנה חיצונית (איור 4). המודול מגיע במארז LCC-18 בגודל 9.7 מ"מ x 10.1 מ"מ, עם דיוק מיקום Circular Error Probable (CEP) של 1.5 מטר ועם זמן-לקביעה-ראשונה (TTFF) עבור התחלה חמה וקרה הקצר עד למתחת ל- 32 שניות ומתחת ל- 1.5 שניות, בהתאמה (GPS, GLONASS). יש לו צריכת הספק באופן-המתנה של 17 מיקרו-וואט (µW) וצריכת הספק בעקיבה של 75 מיליוואט (mW).
 איור 4: מודול GNSS Tesco-LIV3F כולל ליבת GNSS ותת-מערכות, ובנוסף כל החיבוריות וניהול הספקת-כוח הנדרשים, במארז בגודל 9.7 x 10.1 מ"מ. הוא דורש אנטנה חיצונית. (מקור התמונה: STMicroelectronics)
איור 4: מודול GNSS Tesco-LIV3F כולל ליבת GNSS ותת-מערכות, ובנוסף כל החיבוריות וניהול הספקת-כוח הנדרשים, במארז בגודל 9.7 x 10.1 מ"מ. הוא דורש אנטנה חיצונית. (מקור התמונה: STMicroelectronics)
מתנד גביש מקוזז-טמפרטורה (TCXO) 26 מגה-הרץ (MHz) על-הלוח של ה- Tesco-LIV3F עוזר להבטיח דיוק גבוה, ומתנד שעון זמן-אמת (RTC) 32 קילו-הרץ (KHz) ייעודי מאפשרים זמן-לקביעה-ראשונה (TTFF) מקוצר. מאפיינים כגון רישום נתונים, GNSS בסיוע אוטונומי בן שבעה ימים, יכולת הגדרת תצורת הקושחה (FW), כמו גם שידרוגי FW, מופעלים באמצעות זיכרון Flash משובץ של 16 מגה-ביט (Mbit).
היישומים המתאימים ל- Tesco-LIV3F כוללים ביטוח, לוגיסטיקה, רחפנים, אגרות נסיעה, מערכות נגד גניבות, מיקום אנשים וחיות מחמד, מעקב אחר רכבים ושיחות חירום.
כפיתרון מורשה-מראש, השימוש במודול Teseo-LIV3F יכול להביא לזמן יציאה לשוק קצר יותר של היישום הסופי. יש לו תחום טמפרטורות פעולה של 40°C- עד 85°C+.
כדי להתנסות עם המודול ולהאיץ את פיתוח היישומים, המתכננים יכולים להשתמש בלוח ההערכה AEK-COM-GNSST31. בעת שימוש ביחד עם הקושחה X-CUBE-GNSS1, ערכת ההערכה יכולה לתמוך בקליטה, מעקב, ניווט והוצאת נתונים ללא זיכרון חיצוני. לוח הערכה זה מתוכנן גם לשימוש עם המיקרו-בקר SPC5 לפיתוח יישומים בכלי-רכב.
מודול GNSS עם הפחתת הפרעות
מקלט GNSS רב-מערכים mosaic-X5 410322 מבית Septentrio הוא מודול הרכבה-משטחית בהספק-נמוך בגודל של 31 מ"מ x 31 מ"מ x 4 מ"מ המעניק למתכננים מערך של ממשקים, כולל ארבעה UART, Ethernet, USB, SDIO ושני GPIO ניתנים-לתכנות על ידי המשתמש.
מתוכנן עבור שימוש ברובוטיקה, מערכות אוטונומיות ויישומי שוק-המוני אחרים, ל- mosaic-X5 יש קצב עדכון של 100 הרץ (Hz), שיהוי (Latency) של פחות מ- 10 מילי-שניות (ms), ודיוק מיקום RTK אנכי ואופקי של 0.6 ס"מ ו- 1 ס"מ, בהתאמה. הוא יכול לעקוב אחר כל מערכי GNSS, תומךבאותות נוכחיים ועתידיים, ותואם לתיקוני PPP, SSR, RTK ו- SBAS. זמן TTFF של המודול הוא פחות מ- 45 שניות בהתחלה קרה ופחות מ- 20 שניות בהתחלה חמה.
ה- mosaic-X5 כולל מספר טכנולוגיות מוגנות-פטנט של Septentrio, כולל +AIM, טכנולוגיית הפחתת הפרעות על-הלוח המשככת מגוון של מפריעים, החל מאותות פס-צר רצופים פשוטים וכלה בפס-רחב ומשבשים בפולסים מורכבים.
הממשקים, הפקודות והודעות הנתונים של המודולים מתועדים במלואם. תוכנת RxTools הכלולה מאפשרת הגדרת-תצורה וניטור של המקלט, כמו גם רישום נתונים וניתוח.
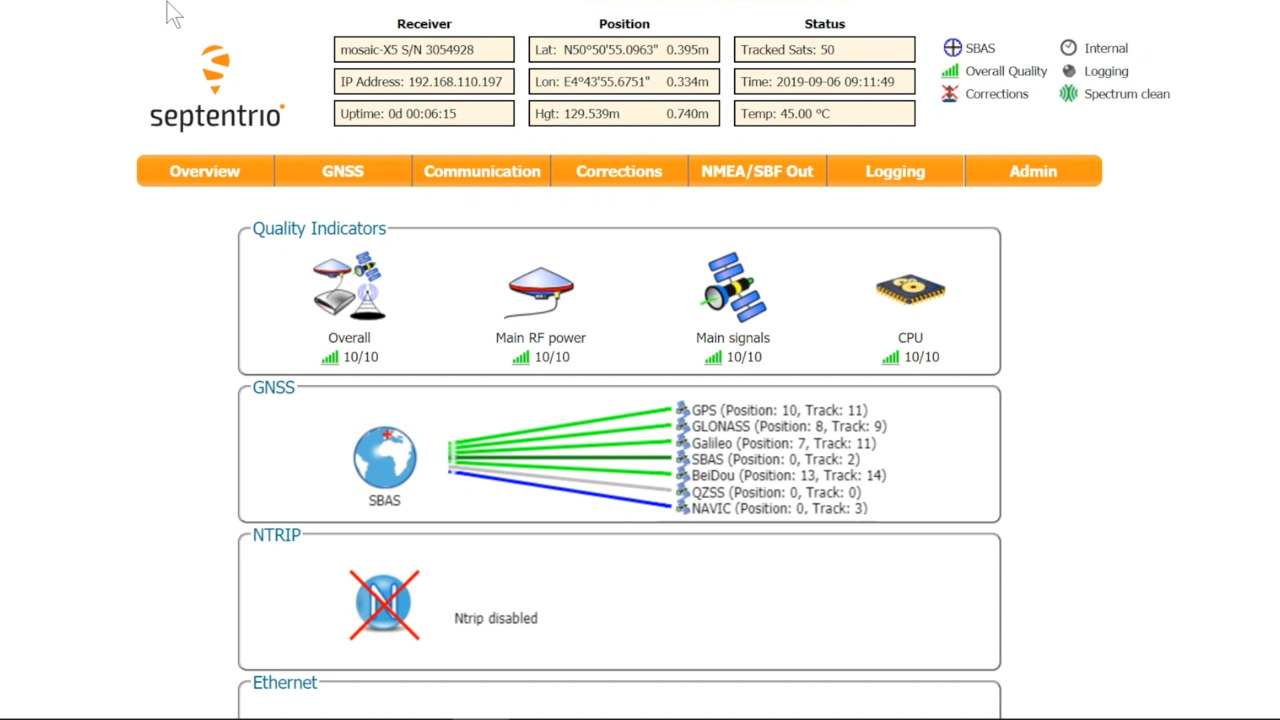
ערכת הפיתוח mosaic-X5 410331P3161 מבית Septentrio מאפשרת למתכננים לחקור, להעריך ולפתח אבות-טיפוס המנצלים את מלוא היתרונות של יכולות ה- mosaic-X5 (איור 5).
 איור 5: המתכננים יכולים ליצור אב-טיפוס באמצעות ערכת הפיתוח 410331P3161 mosaic-X5 תוך שימוש במגוון של חיבורים, כולל Ethernet, נקודות-חיבור COM או USB 2.0, או באמצעות כרטיס זיכרון SD. (מקור התמונה: Septentrio)
איור 5: המתכננים יכולים ליצור אב-טיפוס באמצעות ערכת הפיתוח 410331P3161 mosaic-X5 תוך שימוש במגוון של חיבורים, כולל Ethernet, נקודות-חיבור COM או USB 2.0, או באמצעות כרטיס זיכרון SD. (מקור התמונה: Septentrio)
הערכה משתמשת בממשק המשתמש האינטואיטיבי של mosaic-X5 להפעלה וניטור קלים, ומאפשרת למתכננים לבקר את מודול המקלט מכל התקן או מחשב ניידים. ממשק האינטרנט משתמש באינדיקטורי איכות קלים-לקריאה כדי לנטר את פעולת המקלט.
המתכננים יכולים ליצור אב-טיפוס על ידי שילוב ערכת הפיתוח mosaic באמצעות כל אחד מהחיבורים הבאים: Ethernet, נקודות-חיבור COM, USB 2.0, כרטיס זיכרון SD.
מודול GNSS עם אנטנה משולבת
עבור מתכנני יישומים היכולים להפיק תועלת משימוש במודול GNSS עם אנטנה משולבת, חברת Würth Elektronik מציעה את מודול Erinome-I 2614011037000 עם מודול מערכת-על-שבב (SoC) (איור 6). המודול תומך במערכי GNSS GPS, GLONASS, Galileo ו- BeiDou, ומגיע עם אנטנה משולבת מלמעלה המפשטת את אינטגרציית החומרה ומקצרת את זמן היציאה לשוק. המודול, כולל האנטנה המשולבת, הוא בגודל של 18 מ"מ x 18 מ"מ.
 איור 6: ה- Erinome-I 2614011037000 מבית Würth Elektronik הוא מודול GNSS שלם עם SoC GNSS עם ביצועים עיליים ובנוסף אנטנה משולבת. (מקור התמונה: Würth Elektronik)
איור 6: ה- Erinome-I 2614011037000 מבית Würth Elektronik הוא מודול GNSS שלם עם SoC GNSS עם ביצועים עיליים ובנוסף אנטנה משולבת. (מקור התמונה: Würth Elektronik)
במודול כלולים גם מתנד TCXO, מסנן RF, מגבר עם רעש-נמוך (LNA) וזיכרון Flash טורי.
חברת Würth מציעה גם את לוח ההערכה (EVB) 2614019037001 עבור ה- Erinome-I (איור 7). ה- EVB יכול לשמש גם כתכן ייחוס עבור שילוב מודול GNSS ביישום. נקודת-חיבור USB יכולה לשמש לחיבור ה- EVB למחשב אישי (PC). מחבר רב פינים נותן למתכננים גישה לכל הפינים של מודול GNSS.
 איור 7: לוח ההערכה 2614019037001 עבור ה- Erinome-I (ליד מרכז הלוח, כאשר האנטנה המשולבת נראית במרכז המודול) פועל גם כתכן ייחוס. (מקור התמונה: Würth Elektronik)
איור 7: לוח ההערכה 2614019037001 עבור ה- Erinome-I (ליד מרכז הלוח, כאשר האנטנה המשולבת נראית במרכז המודול) פועל גם כתכן ייחוס. (מקור התמונה: Würth Elektronik)
תוכנת ניווט ולוויין Würth Elektronik (WENSS) היא כלי מחשב אישי פשוט לאינטראקציה עם מודול GNSS Erinome-I באמצעות ממשק UART. הוא תומך ב-:
- בקרה של פעולת ה- EVB
- תקשורת דו-כיוונית עם מודול Erinome-I
- הערכה של מאפייני ויכולות ה- Erinome-I
- היכרות עם הפרוטוקולים, משפטים ופקודות של ה- Erinome-I
- הגדרת תצורה של ה- Erinome-I ללא ידע בפרוטוקולים
- ניתוח משפטים ופקודות המשמשים את ה- Erinome-I
ה- WENSS מאפשר הערכה קלה של יישומי מיקום ללא ידע מתקדם. מפתחים מנוסים יכולים גם כן להשתמש ב- WENSS עבור תצורות מתקדמות יותר.
סיכום
יכולת מיקום מדויקת ואמינה מושגת בצורה הטובה ביותר באמצעות מספר מערכים עם תמיכה בטכנולוגיית תיקון נלווית. מדובר במערכות מורכבות, אך המתכננים יכולים לפנות למודולי GNSS מהונדסים-מראש, ערכות פיתוח וסביבות נלוות כדי להשוות בין האפשרויות במהירות וביעילות ולממש מאפיינים ושירותים מבוססי-מיקום.
המלצות לקריאה נוספת
מיאון אחריות: דעות, אמונות ונקודות מבט המובעות על ידי מחברים שונים ו/או משתתפי פורום באתר אינטרנט זה לא בהכרח משקפות את הדעות, האמונות ונקודות המבט של חברת DigiKey או את המדיניות הרשמית של חברת DigiKey.